
.png)
東方馬達
Oriental motor
步進馬達單體
PKP/PK(2相) 系列
高轉矩、低振動之2相、5相步進馬達。
備有減速機型或高解析度型、附編碼器等各種機型。
馬達的電流規格也很齊全。
(驅動時必須另行準備驅動器。)


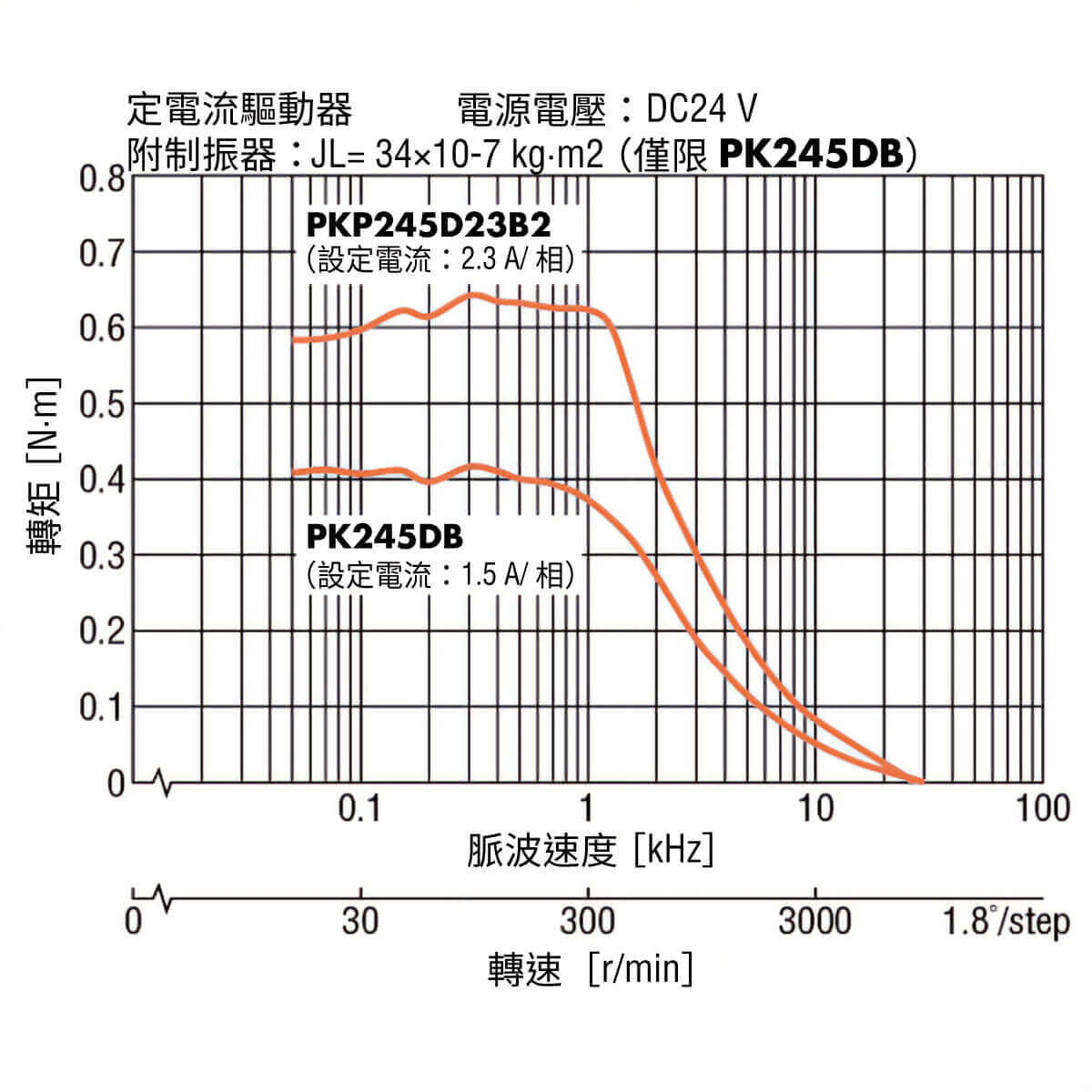
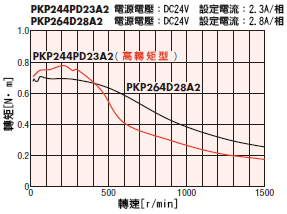
▎高轉矩化
藉由重新檢討馬達線圈設計,進而達到高電流化。實現從低速領域到高速領域的轉矩提升。
| 同等尺寸的轉速-轉速特性比較 | 激磁最大靜止轉矩比較 |
 |
 |
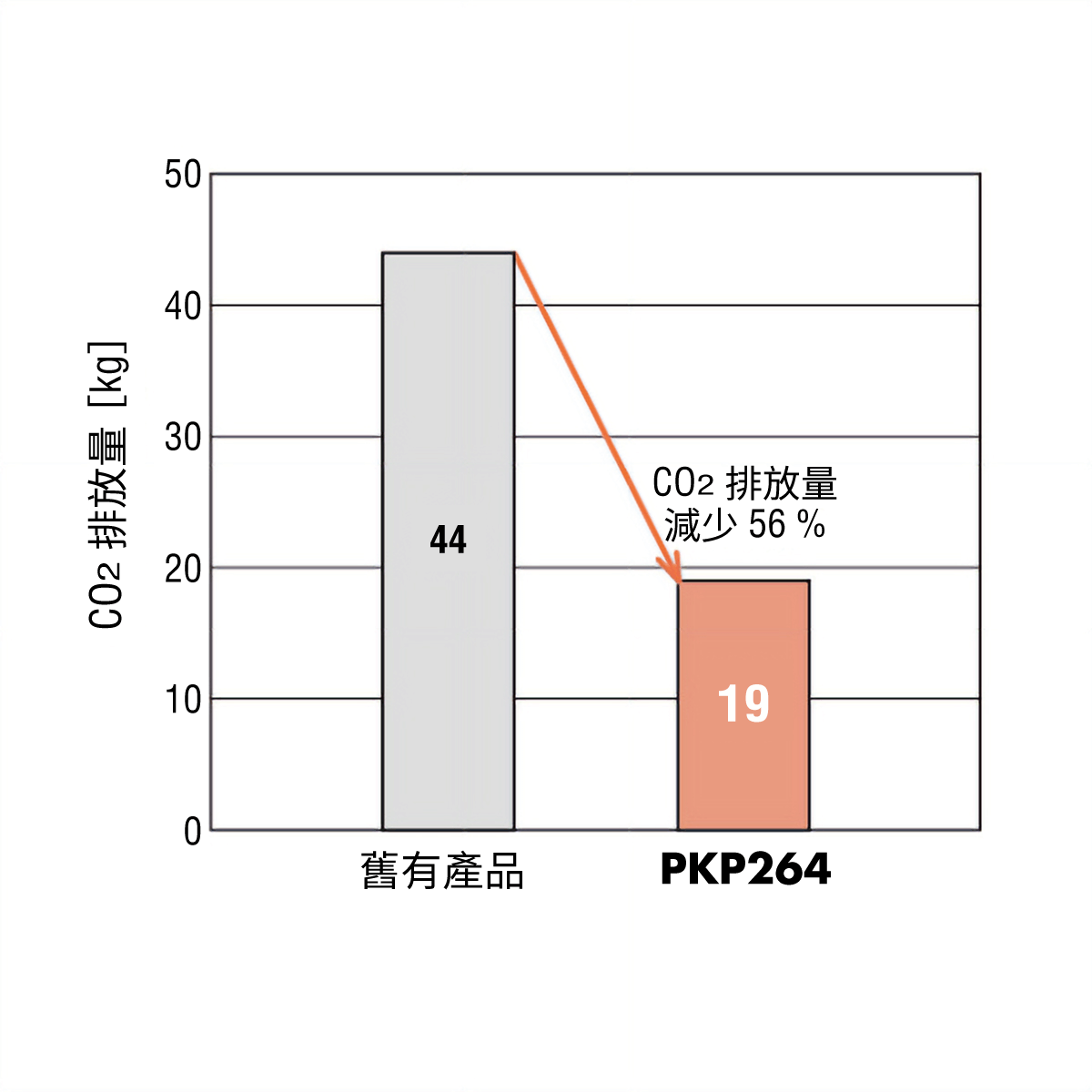
▎節能・省電
藉由減少對馬達供應的運轉電流,就算用與舊有產品同等的轉矩運轉,也能減少消耗電力及CO2排放量。
消耗電力・CO2排出量較過去減少56 %(本公司比)
消耗電力・CO2排出量較過去減少56 %(本公司比)
 |
|
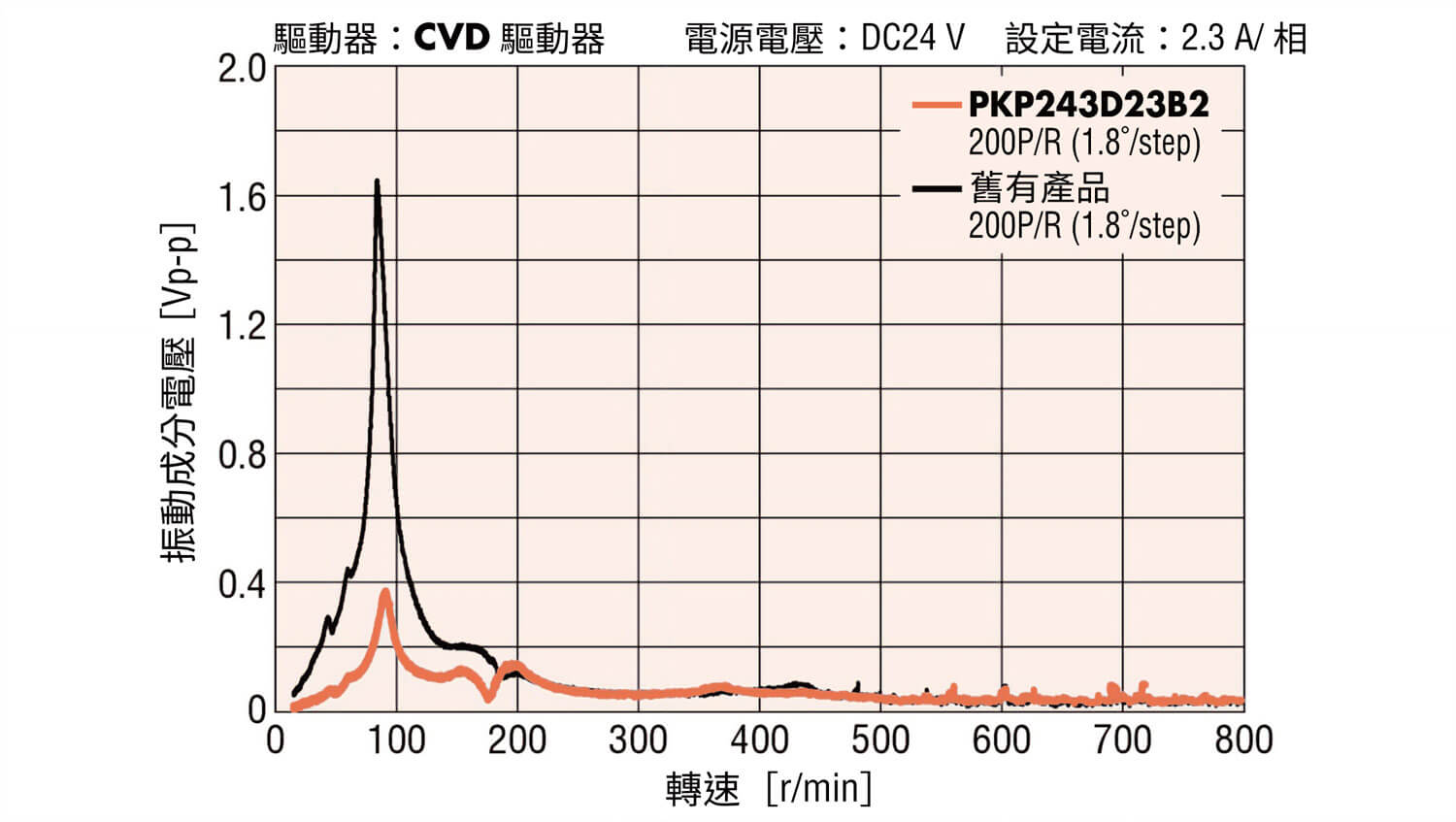
▎低振動
改進磁性設計,實現了比傳統產品更低的振動。
▎透過小型化達到節省資源
跟舊有產品相比,轉矩大幅提升。相同轉矩的情况下,使用PKP系列可以使馬達更加小型化。這有助於節省空間並減輕設備的重量。
外型比較體積減少了44%!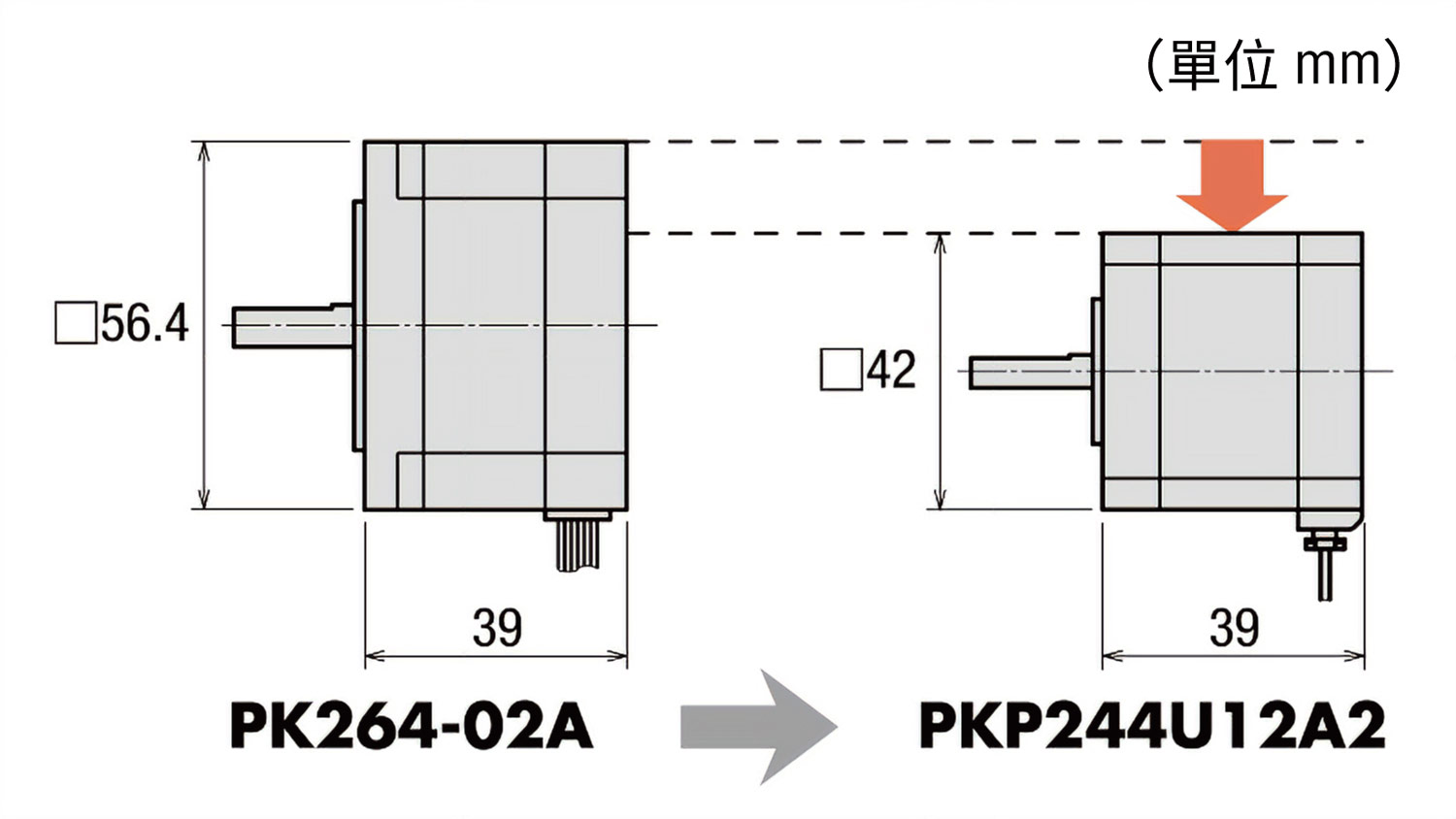 |
|
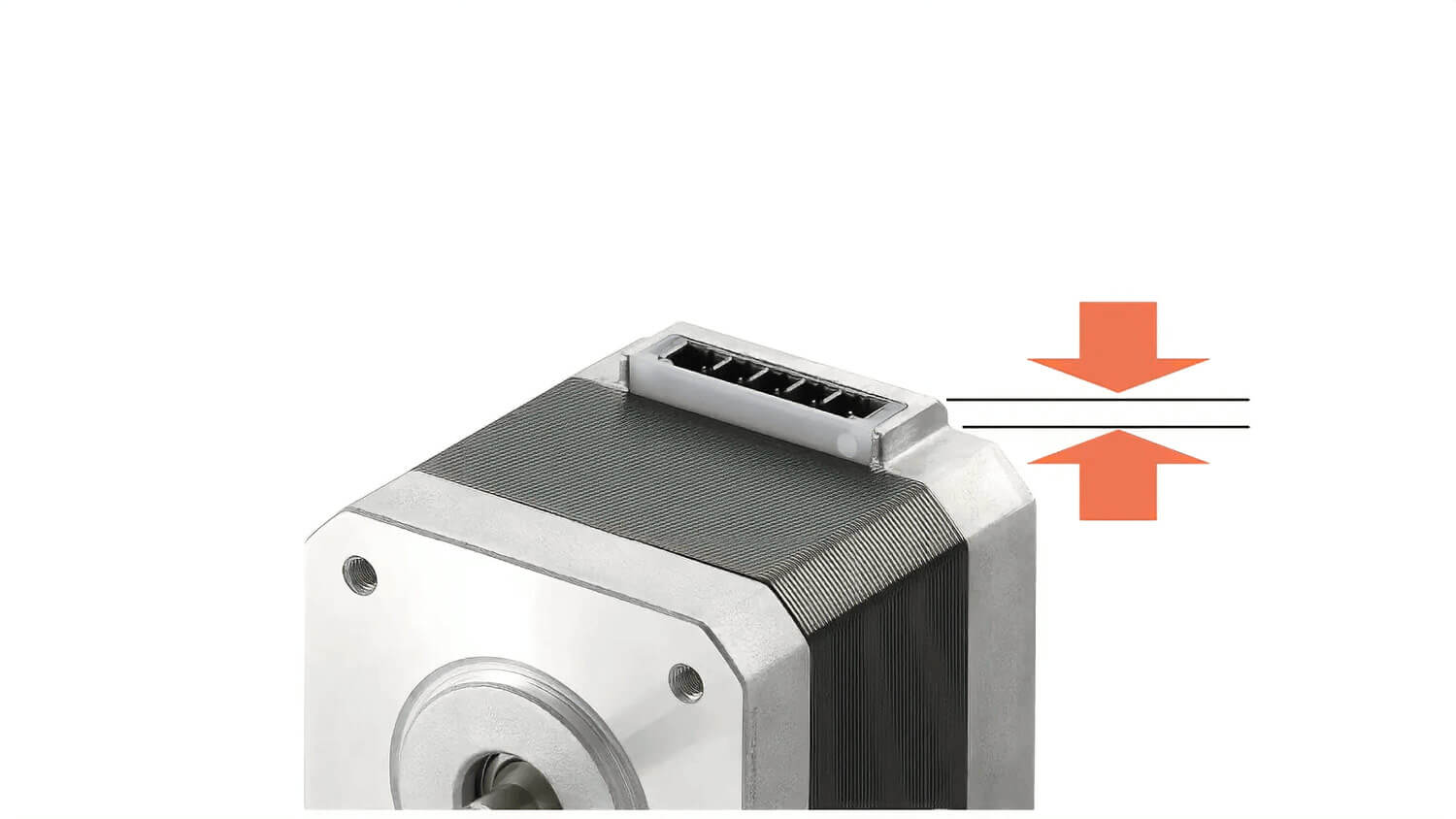
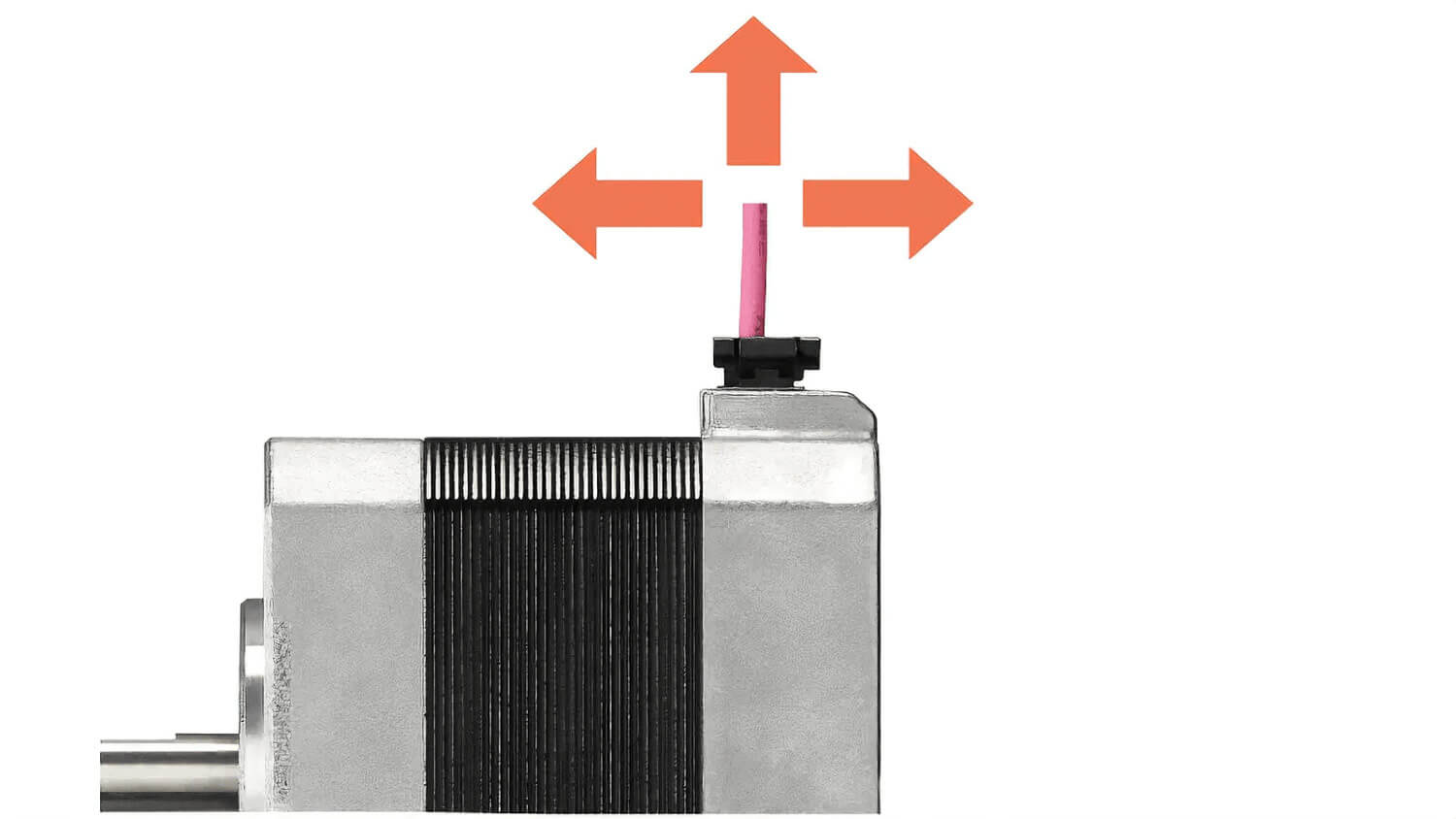
▎採用小型・薄型連接器
PKP系列採用小型、薄型連接器,連接器部的突出降低(部分產品除外)。也因馬達電纜線的出線方向朝上,配線自由度相對提高。
 |
 |
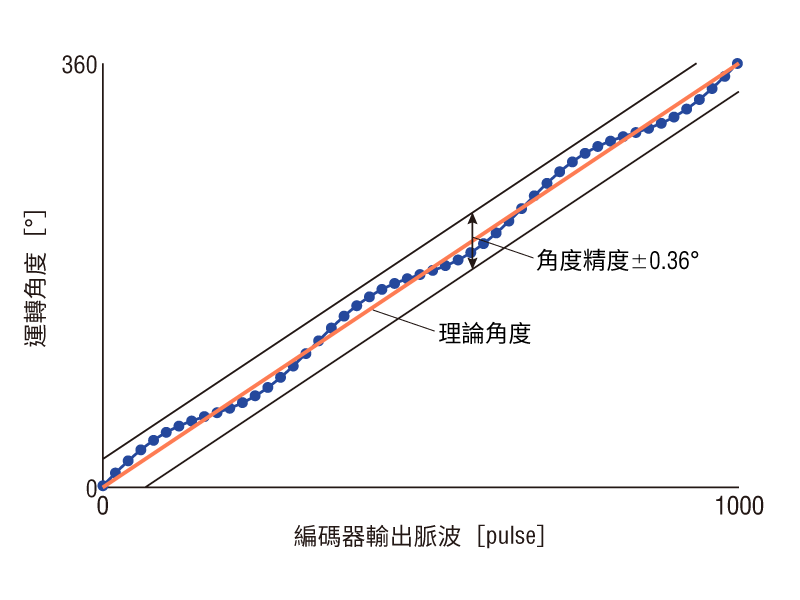
▎附編碼器
備有附編碼器型。比較現在位置與指令位置,藉此確認馬達的正常動作。
█ 編碼器主要規格
* 標準型安裝尺寸42 mm、56.4 mm,備有解析度1000 P/R的產品種類。 |
關於角度精度
|
||||||||||||
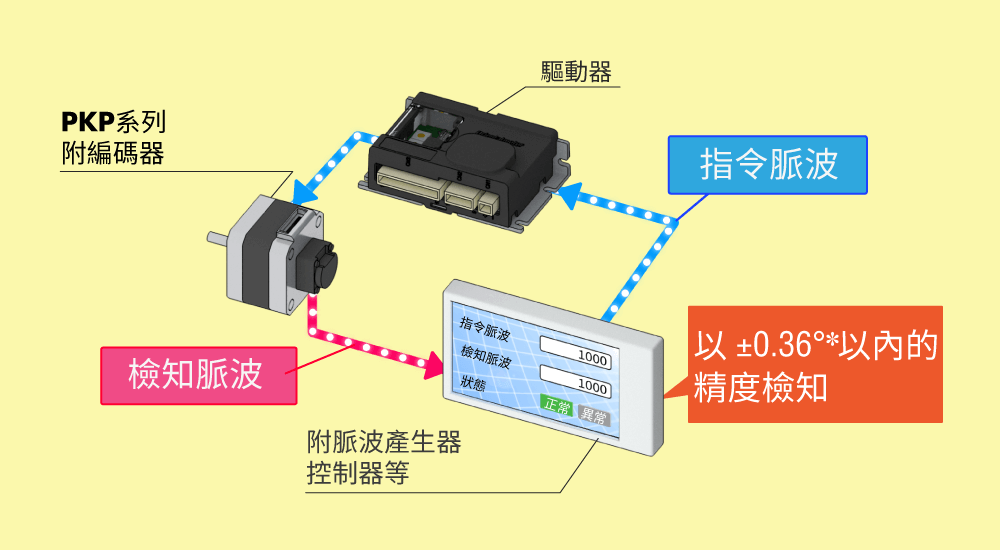
█ 可檢知馬達位置資訊
可監視現在位置或檢知位置差距等。
例如,比較現在位置與指令位置,藉此確認馬達的正常動作。
例如,比較現在位置與指令位置,藉此確認馬達的正常動作。
系統構成範例
*(馬達出力軸的換算值)
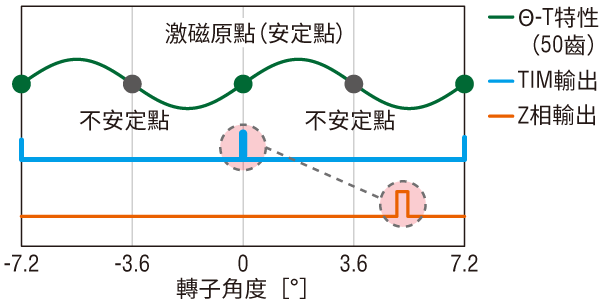
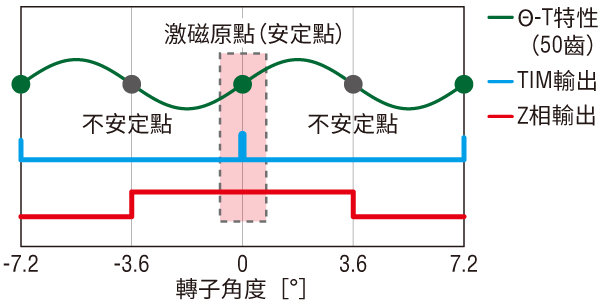
█ 高重現性的原點復歸
由於在激磁原點(安定點)輸出Z相信號,可代替原點檢知器(安裝於馬達軸運轉1圈內檢知原點的檢知器)。
另外,便於併用Z相輸出信號與TIM輸出信號*,提高原點復歸的重現性。
另外,便於併用Z相輸出信號與TIM輸出信號*,提高原點復歸的重現性。
*這是馬達輸出軸從原點每次旋轉 7.2°(高解析度型號為 3.6°)時驅動器輸出的訊號。
| Z相輸出的時序不固定時 | Z相輸出的時序固定時 新型編碼器(磁性型) |
|
 |
 |
|
| 由於Z相信號的輸出時序不固定,難以代替原點檢知器,也不容易與TIM信號併用。 | 以激磁原點(安定點)為中心,於±3.6°的範圍輸出Z相信號。 |
█ 搭載小型編碼器
| 安裝尺寸56.4 mm時 *外形圖色部分為編碼器部。 |
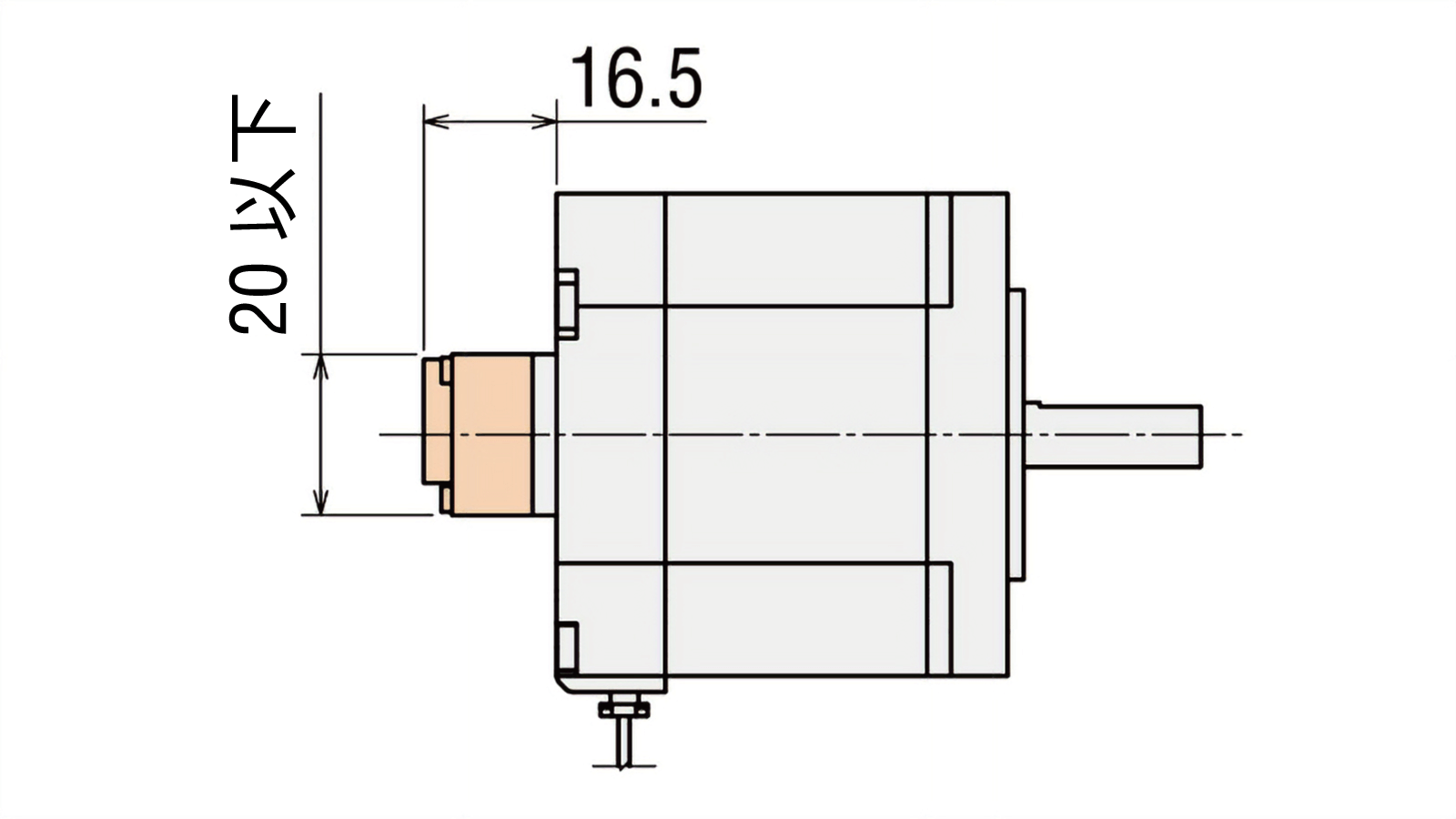 |
█ 可選擇電壓輸出型和Line Driver輸出型
備有可選擇電壓輸出型和Line Driver輸出型。
以外,備有便於編碼器配線的另售電纜線。
以外,備有便於編碼器配線的另售電纜線。
▎附電磁煞車型
亦備有附電磁剎車的標準型及高解析度型。
█ 電源OFF時或停電時可保持位置
馬達與無激磁作動型電磁剎車之組合產品。
發生停電等意外時能保持負載預防落下。另外,馬達停止時啟動電磁剎車即可關閉馬達電流以抑制馬達發熱。
發生停電等意外時能保持負載預防落下。另外,馬達停止時啟動電磁剎車即可關閉馬達電流以抑制馬達發熱。
例:垂直升降裝置
█ 大幅轉矩提升
與PKP系列標準型相比,大幅轉矩提升。
活用此高轉矩,可考慮縮短馬達長度或選用更小的安裝尺寸。
活用此高轉矩,可考慮縮短馬達長度或選用更小的安裝尺寸。
|
與相同安裝尺寸比較時
<外形比較>單位:mm 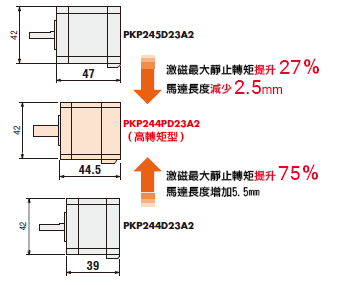 |
與安裝尺寸56.4mm的馬達比較時
<外形比較>單位:mm 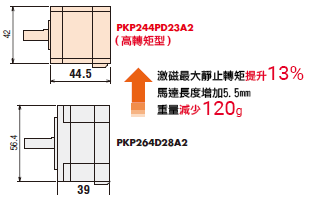 |
|
<轉矩特性比較>
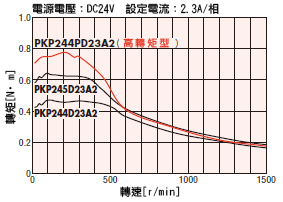 |
<轉矩特性比較>
 |
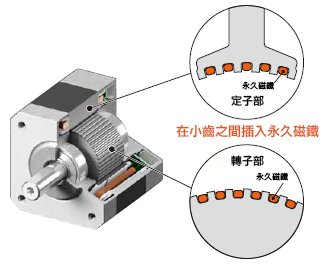
█ 產生高轉矩的新構造
高轉矩型在轉子與定子中的小齒間插入永久磁鐵。
由於此構造與舊有的步進馬達相比,小齒前端的磁束密度增加,因此能更有效率地產生轉矩。
由於此構造與舊有的步進馬達相比,小齒前端的磁束密度增加,因此能更有效率地產生轉矩。
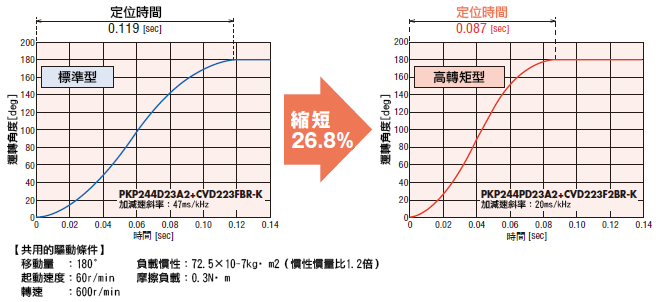
▎高響應馬達
█ 提升響應性
與標準型相比,高轉矩型具備更優異的響應性。
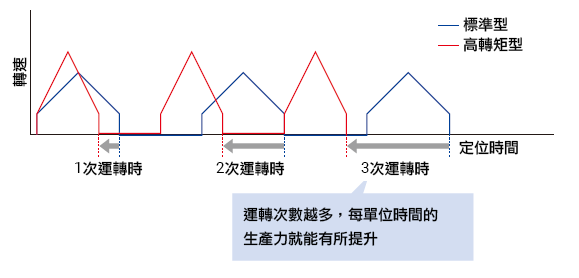
█ 有助於提高生產力
可望透過提升響應性以提高生產力。
特別是在短行程反覆定位之用途上可發揮其實力。
特別是在短行程反覆定位之用途上可發揮其實力。
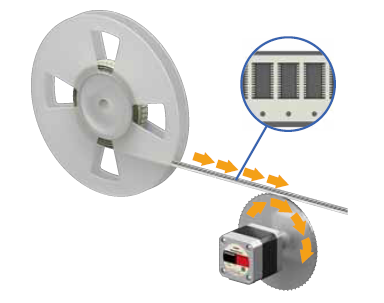
<使用例>
此為用於電子零件捲帶的進料用途上。
此為用於電子零件捲帶的進料用途上。
▎高強度馬達
|
█ 增加容許懸吊載重
出力軸徑為Φ8mm,比標準型(Φ5mm)更粗。 因此容許懸吊載重也變大。 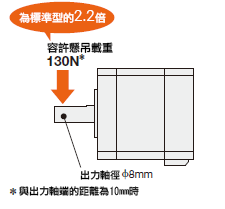 |
█ 減輕組裝時的負載
舉例來說,用於皮帶·輪機構上時,由於「將皮帶張力控制在最小程度」、「設計不讓懸吊載重集中於馬達出力軸上」,可望減輕組裝時的調整和時間精力。 |
▎雙極驅動用驅動器
|
█ 附安裝板 水平式連接器
連接器的方向為橫向。 |
█ 附安裝板
連接器的方向為朝上。 |
█ 無安裝板
連接器的方向為朝上。 |
 |
 |
 |
█ 單極驅動用驅動器

▎2相

█ 與本公司驅動器的連接方法
<與2相CVD驅動器連接時>
您可從以下3種連接方法中選用任1種。
・ 使用1條連接用電纜線連接
・ 使用中繼電纜線延長連接用電纜線後連接
・ 由客戶使用馬達側連接用電纜線,自行連接驅動器側
您可從以下3種連接方法中選用任1種。
・ 使用1條連接用電纜線連接
・ 使用中繼電纜線延長連接用電纜線後連接
・ 由客戶使用馬達側連接用電纜線,自行連接驅動器側
<與2相CMD驅動器連接時>
請客戶使用馬達側連接用電纜線,自行連接驅動器側。
請客戶使用馬達側連接用電纜線,自行連接驅動器側。
注意事項
・ 用於馬達與驅動器間的連接用電纜線合計最多3條。
・ 馬達與驅動器間的最大延長距離如下。
2相雙極接線馬達與2相CVD驅動器:10m
2相單極接線馬達與2相CMD驅動器:2m
・ 用於馬達與驅動器間的連接用電纜線合計最多3條。
・ 馬達與驅動器間的最大延長距離如下。
2相雙極接線馬達與2相CVD驅動器:10m
2相單極接線馬達與2相CMD驅動器:2m
延伸閱讀
➤ 步進馬達也可以進行閉回路控制嗎?
➤ [東方馬達講堂] 小型高精度提案 開回路步進馬達PKP系列
馬達的種類
| 分類 | 機種 | 安裝尺寸 mm |
高基本步級角 [°] |
接線方式 | 附加功能 |
| 無減速機 |
標準
|
13~85 | 1.8 | 雙極、 單極 |
編碼器、 電磁剎車 |
|
|
28~56.4 | 0.9 | 雙極、 單極 |
編碼器、 電磁剎車 |
|
|
薄型
|
42、60 | 1.8 | 雙極 | 無 | |
| 附減速機 |
|
28~90 | 0.05~0.5 | 雙極、 單極 |
編碼器 |
|
|
28~60 | 0.09~0.36 | 雙極、 單極 |
無 | |
|
|
51、61 | 0.018~0.036 | 雙極 | 無 |





基本步級角0.9°的高解析度步進馬達。提升停止精度。
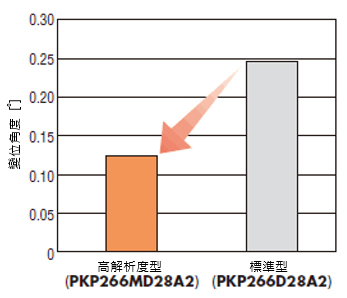
▎解析度提高(與標準型相比)
相對於標準型50片,將轉子的齒條設定為2倍的100齒,使基本步級角成為標準型一半的0.9°。
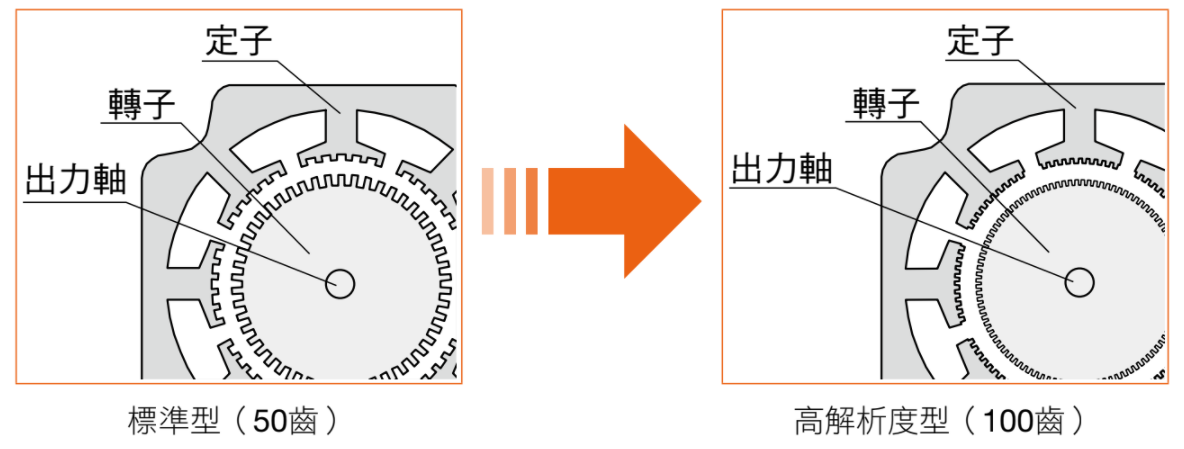
▎提升停止精度(與標準型相比)
與標準型(基本步級角度1.8゜)相比,此馬達對於施加在馬達的摩擦負載之變位角度較小。
因此,使用於滾珠螺桿機構這類經常承受摩擦負載的用途時,可提高停止精度。
因此,使用於滾珠螺桿機構這類經常承受摩擦負載的用途時,可提高停止精度。
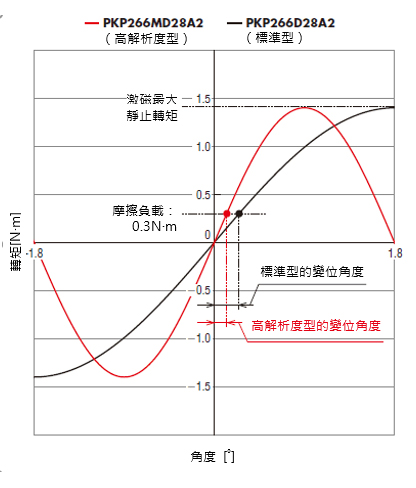
角度-轉矩特性比較(參考值)
(摩擦負載0.3N·m時)
(摩擦負載0.3N·m時)
|
█ 摩擦負載導致的變位角度比較(參考值)
(摩擦負載0.3N·m時)
 |
█ 時常承受摩擦負載的機構範例
比方說如下圖的滾珠螺桿機構,導軌擋塊或導軌時常會對馬達施加摩擦負載。  |
▎共振領域的迴避
使用的脈波速度若位於共振領域,可能使振動變大。變更為高解析度型,可避開共振領域。
能有效減速、提高轉矩、提高解析度並減低震動。
與舊有產品相較,齒隙變小。
與舊有產品相較,齒隙變小。
【齒隙】
單位 -arcmin
|
安裝尺寸\減速比
|
3.6
|
7.2
|
9
|
10
|
18
|
36
|
|
28mm
|
-
|
90(1.5°)
|
||||
|
42mm
|
90(1.5°)
|
60(1°)
|
||||
|
60mm
|
70(1.17°)
|
45(0.75°)
|
||||
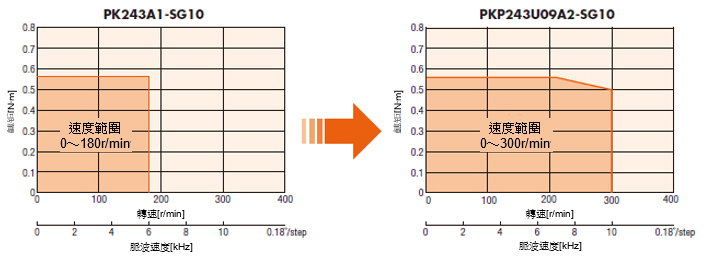
▎與舊有產品相比速度範圍更廣,使用更加方便
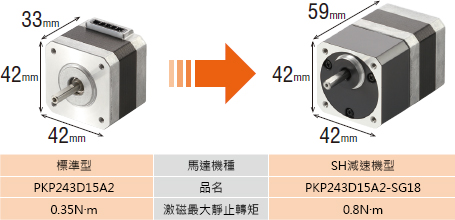
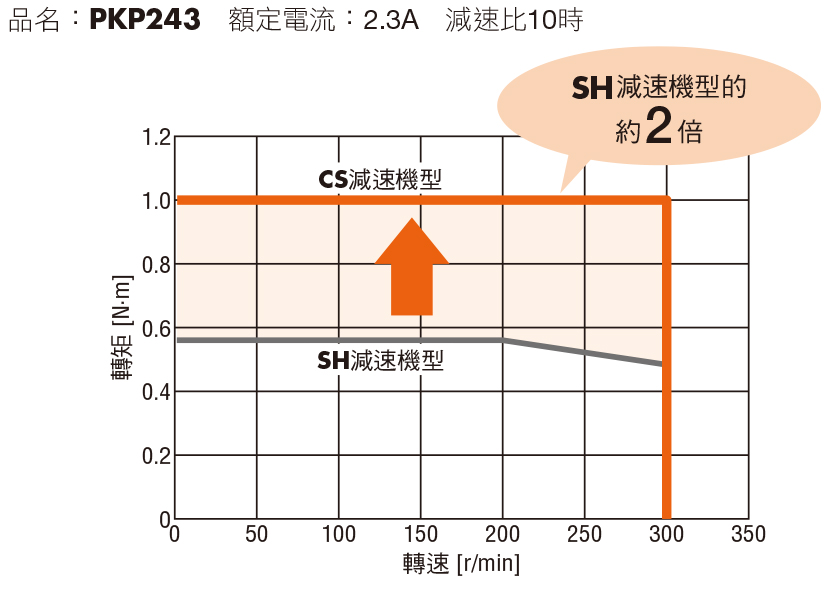
▎相同的馬達安裝尺寸卻能實現轉矩提升
更換為SH減速機型,不須變更馬達的安裝尺寸即可轉矩提升。
當馬達設置空間受限,無法加大安裝尺寸時特別有幫助。
當馬達設置空間受限,無法加大安裝尺寸時特別有幫助。
因應轉矩、出力軸耐載重、設置性等需求之中心軸的減速機型。
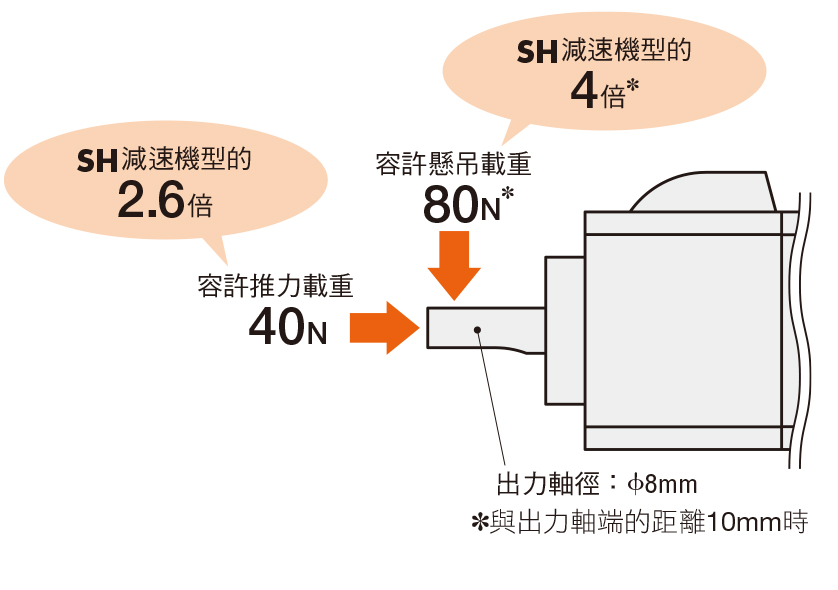
▎實現轉矩及出力軸耐載重提升
CS減速機型無須變更減速機安裝尺寸,便能實現轉矩及出力軸耐載重提升。
|
█ 容許轉矩
|
█ 容許懸吊載重、容許推力載重
|
 |
 |
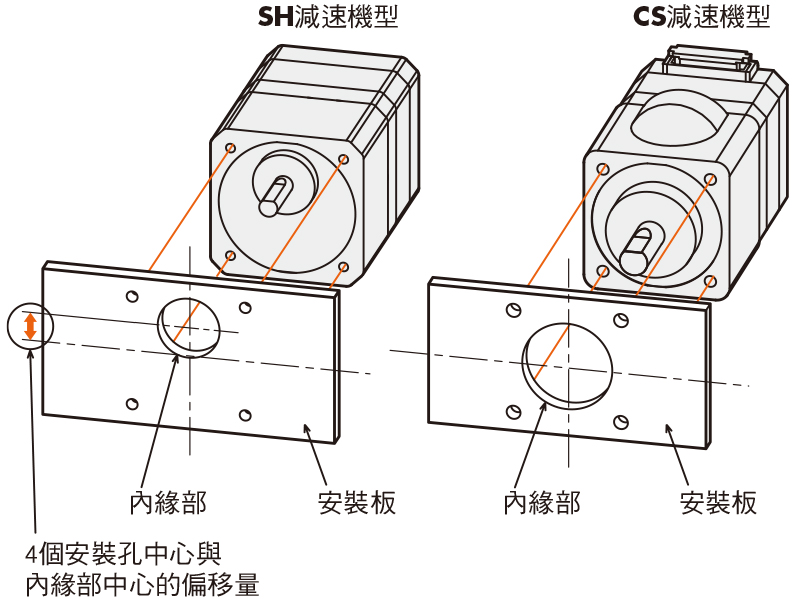
▎透過中心軸減少設計時間
重新檢視減速機構造實現中心軸。減輕安裝板的設計精力。提高馬達電纜線出線方向自由度。
|
█ 如構造圖所示,使齒輪讓開後,可實現將出力軸配置於中心
|
█ 減輕安裝板的設計精力
|
 |
 |
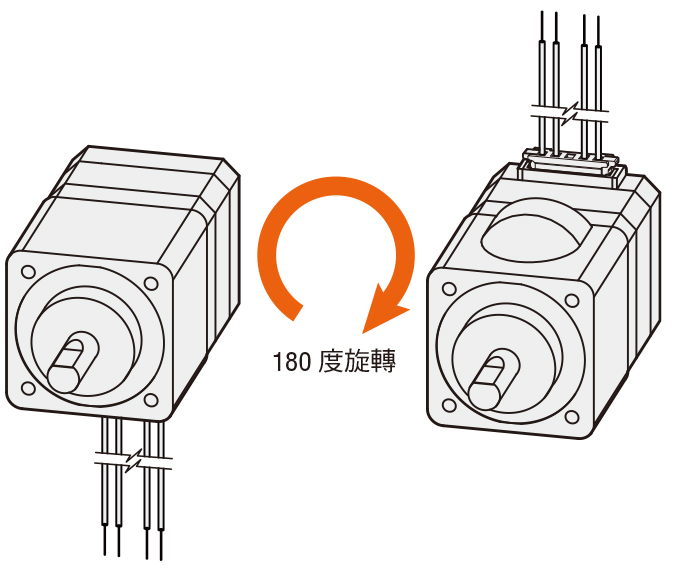
█ 採用中心軸結構,可提高電纜線出線的自由度
可直接將負載安裝於運轉面上,故適用於分度盤等用途。
|
█ 固定負載時,安裝在凸緣面上。
 |
█ 可進行大慣性的驅動。
 |
 為Harmonic Drive Systems Inc.的註冊商標。
為Harmonic Drive Systems Inc.的註冊商標。
如需產品圖檔,請洽廣億科技服務人員,謝謝!