
使用卡氏坐標型機器人可以減少啟動設備所需的時間。

▍減少建立BOM和圖表的時間
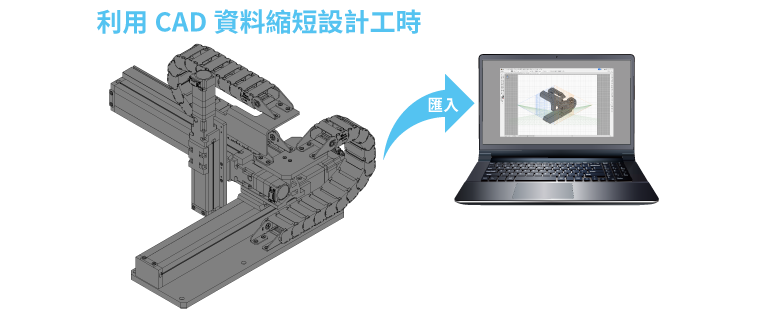 |
使用模組產品建立內部卡氏坐標型機器人時,可能需要數天時間來選擇零件、收集CAD資料和設計金屬配件。預先填入的CAD資料可用於縮短設計時間。 零件數量較少,還減少了創建BOM以及訂購和接收這些零件所需的時間和精力。 |
▍減少組裝和接線時間
-
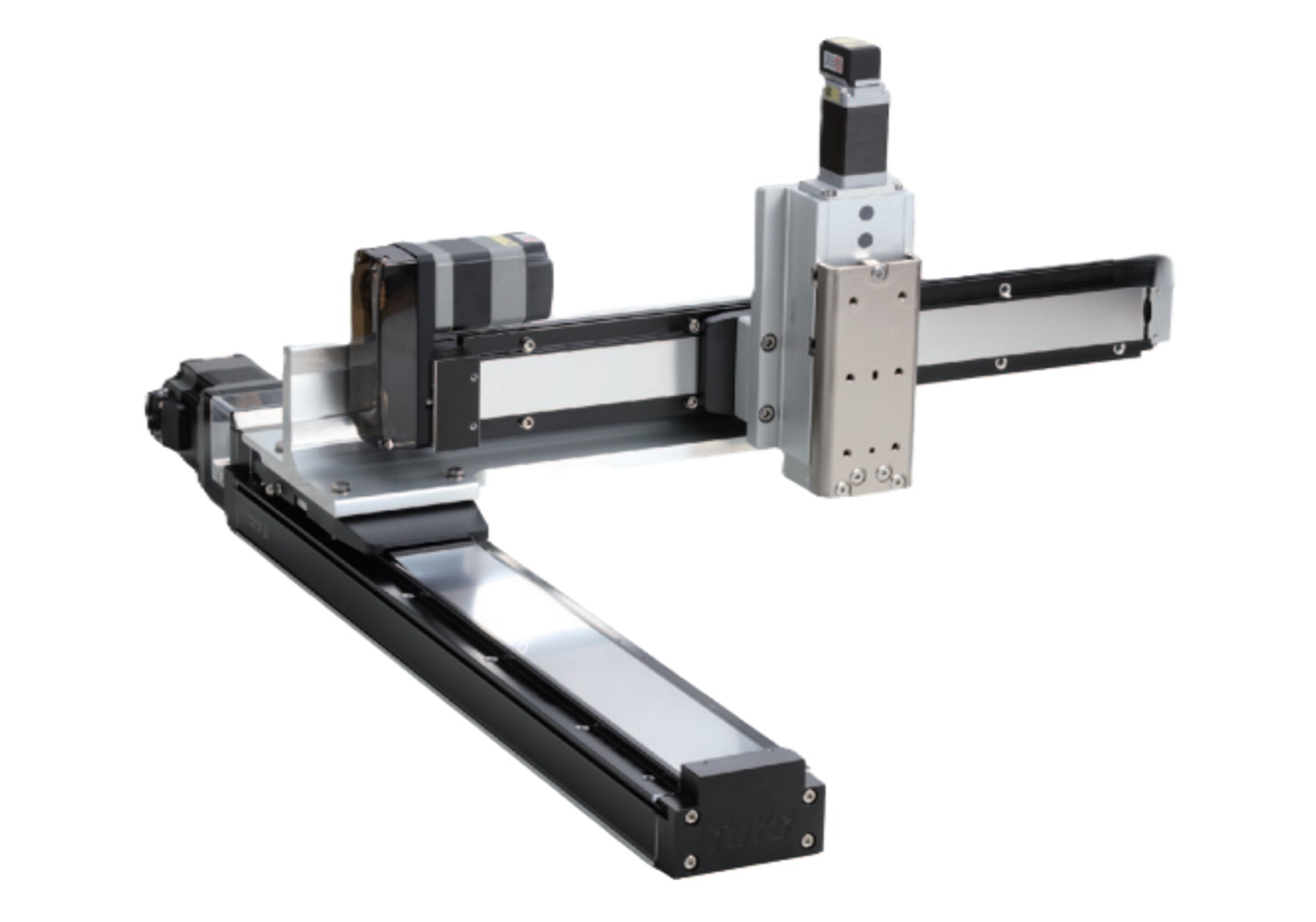
XY連結座及履帶線槽整合完畢,減少配線與組裝時間,提升效率!
-
出貨可組裝完畢出貨,也可BY KIT出貨。

備有懸臂型、龍門型、十字型三種組合方案可選擇。

- 龍門可做雙軸同動功能
- 可搭配旋轉軸進行旋轉定位。或搭配電動夾爪執行取放功能。
▍多種組合方向
可依照需求方向進行組合

▍多種程式命令
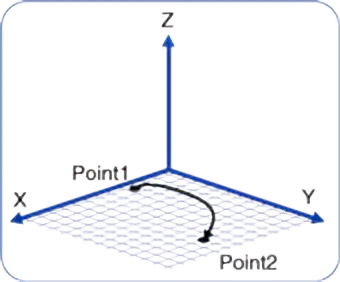
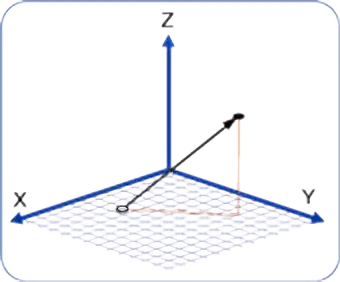
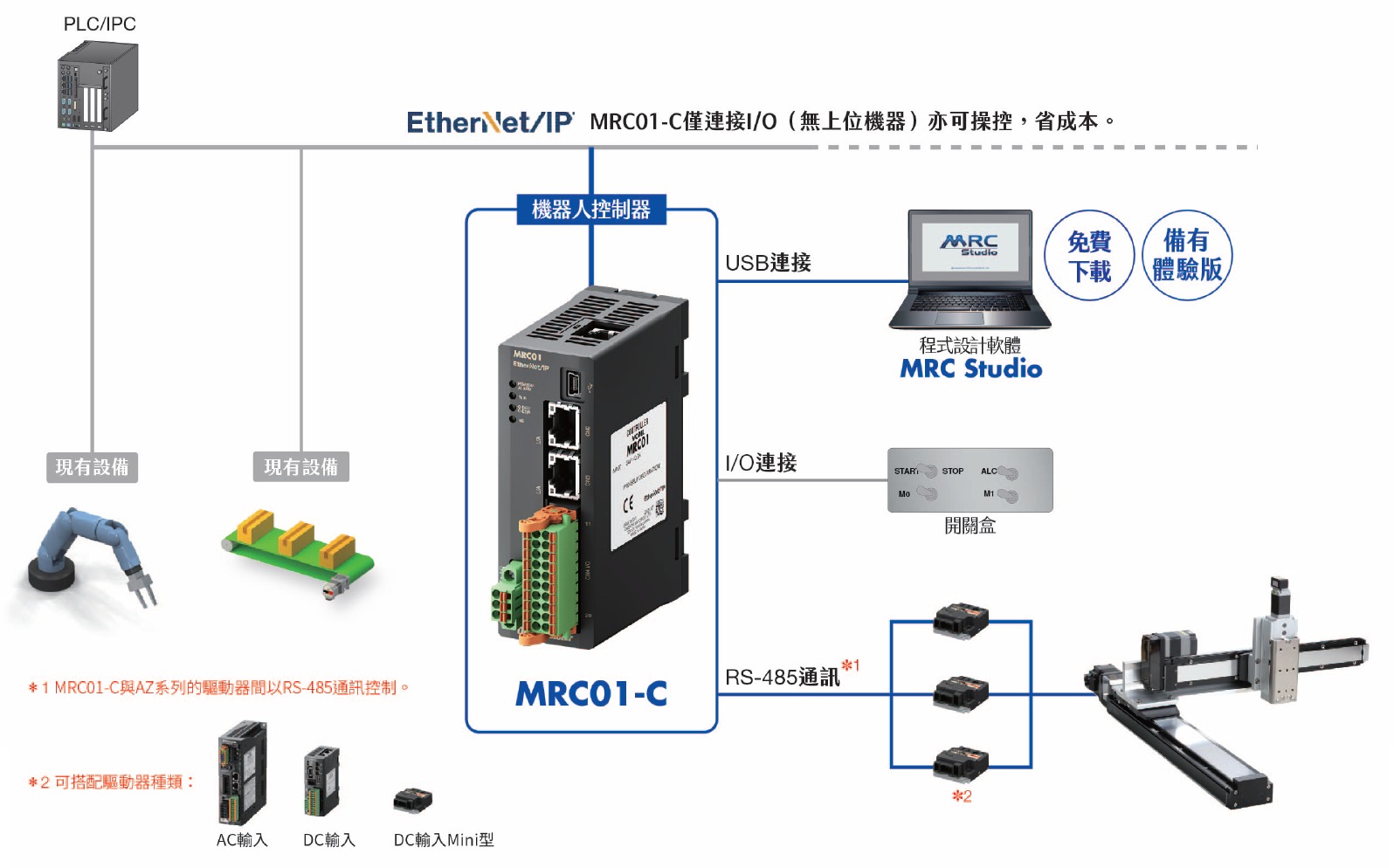
只要依序選擇命令即可。即使不具備階梯圖等專業知識,亦可直覺性製作程式。支援P to P運轉、直線補間運轉、圓弧補間運轉、拱形動作等。除此之外,亦可從上位控制機器藉由EtherNet/IP直接執行運轉資料。
| 命令 | ||||
 |
 |
 |
 |
 |
|
P to P控制
|
直線補間
|
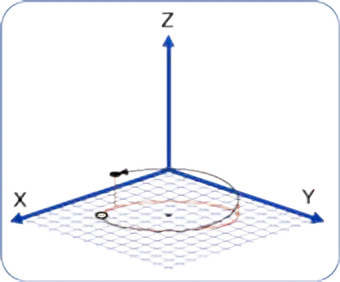
圓弧補間(螺旋補間)
|
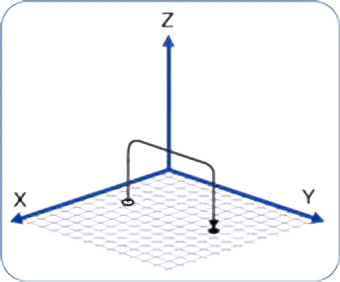
拱形動作
|
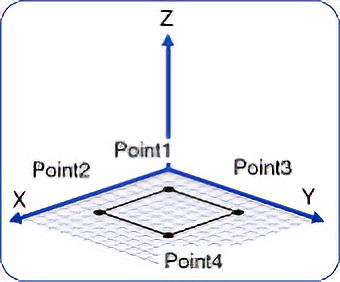
疊棧
|
▍簡單控制的機器人控制器
 |
MRC01-C機器人控制器是卡氏坐標型機器人專用控制器。 它可用於控制小型機器人OVR 3軸卡氏坐標型機器人或內部卡氏坐標型機器人。 |
 |
將機器人控制器MRC01與AZ系列驅動器(最多可搭載8軸)整合為一體的MRCU系列,追加至產品陣容。 在機器人導入時,降低編寫控制系統的技術門檻,並有助於縮短整體建置時間。 |
注意事項:使用機器人時,請考慮其作為工業機器人的安全性。(不能當協働機器人使用)
所有軸均使用αSTEP AZ系列(DC電源輸入)。
絕對式方式消除了外部檢知器的需要,減少了接線,因為無須電池、減少了維護管理的需要。
DC電源輸入使電源線佈線變得容易。可靈活應對線路安裝、佈局變化。
絕對式方式消除了外部檢知器的需要,減少了接線,因為無須電池、減少了維護管理的需要。
DC電源輸入使電源線佈線變得容易。可靈活應對線路安裝、佈局變化。
 |
 |

除了機器人和馬達外,機器人控制器、驅動器和電纜必須各別訂購。
使用機器人控制器MRC01-C和程式設計軟體MRC Studio可以輕鬆控制機器人。
推薦可連接至MRC01-C的驅動器為DC電源輸入型小型驅動器AZD-KD或mini驅動器AZD-KR2D。
實際應用例-SCARA機器人、垂直多關節機器人,電動滑台Z軸升降&水平移動
延伸閱讀

如需產品圖檔,請洽廣億科技服務人員,謝謝!