

東方馬達
Oriental motor
機器人控制器
MRC01-C 系列
專為卡氏座標型機器人設計的低成本控制器,搭配 MRC Studio 軟體,即使沒有 PLC 程式設計經驗,也能輕鬆完成機器人設定與動作控制。
內容大綱 (點擊展開)
- 產品特徵
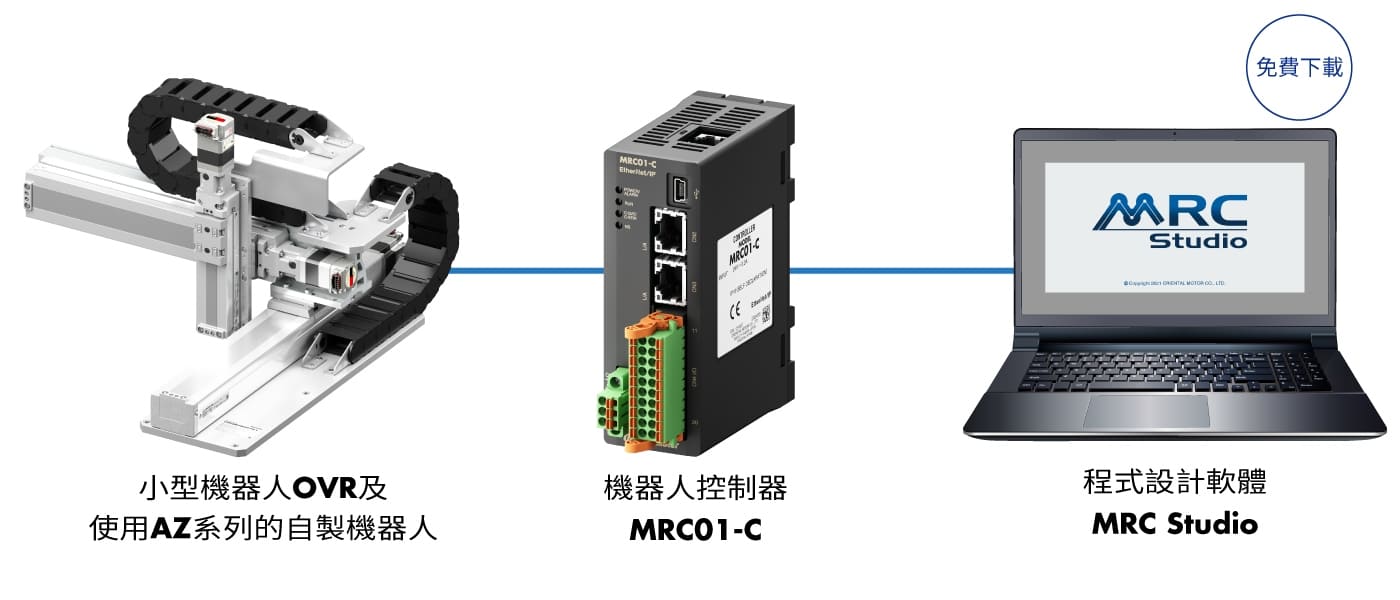
- 使用機器人控制器MRC01-C和程式設計軟體MRC Studio輕鬆設置
- 搭配2D視覺檢知器,進一步使精密作業自動化
- 可設定多個用戶座標系(工具坐標系)
- MRC Studio Simulator 在購入前的檢討階段也可先確認機器人的動作
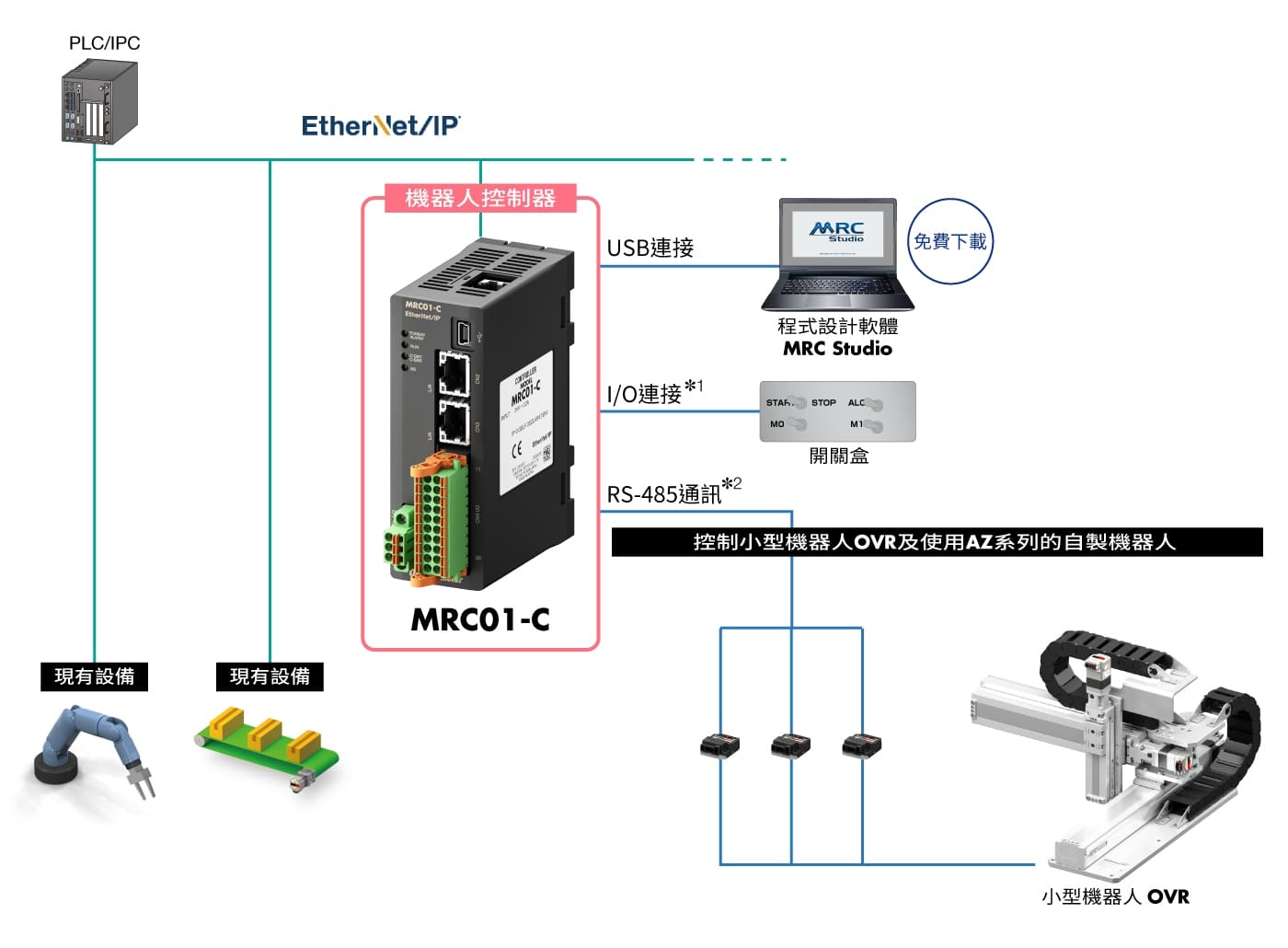
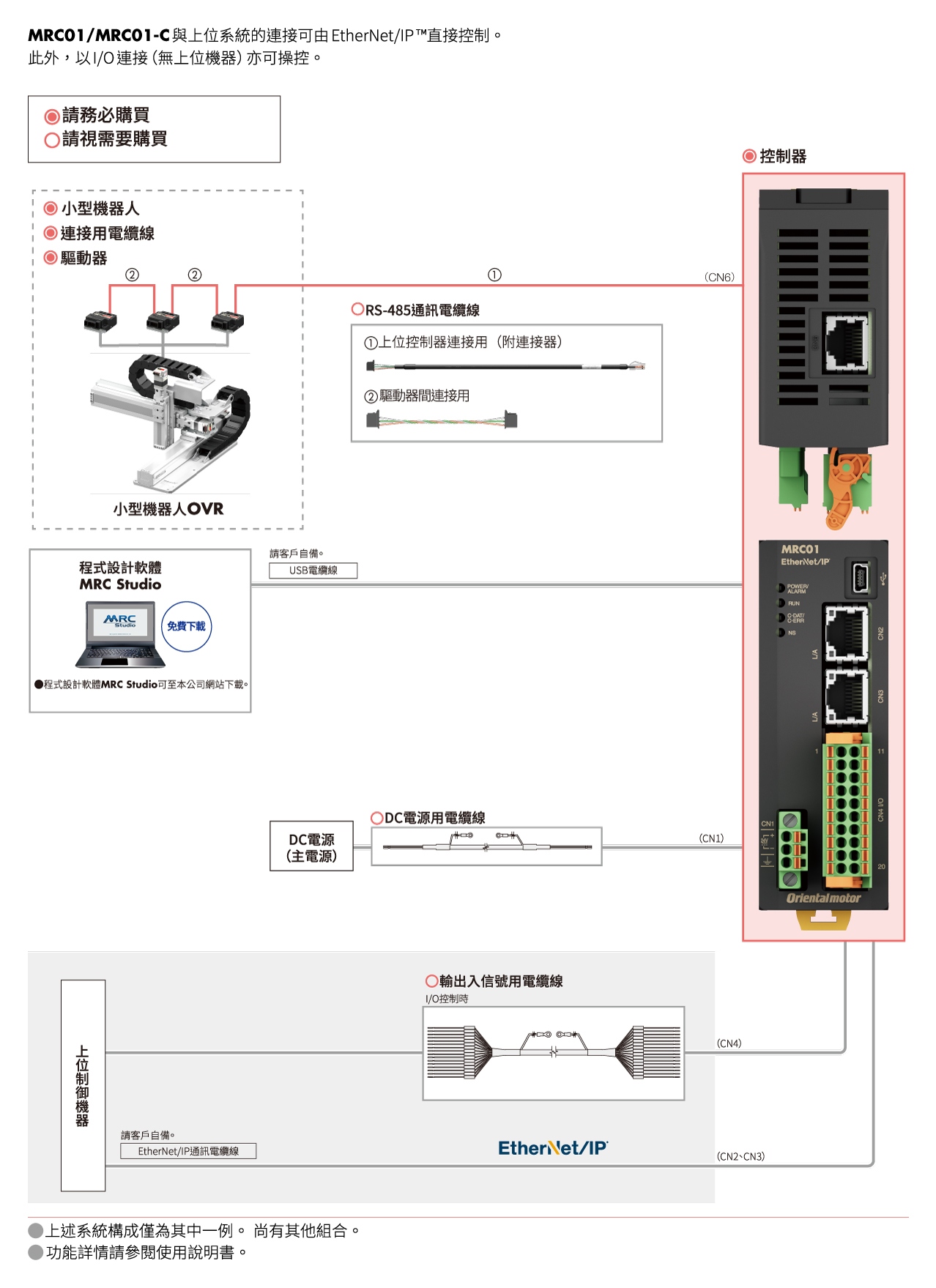
- 系統構成
█ 卡氏坐標型機器人專用低成本控制器
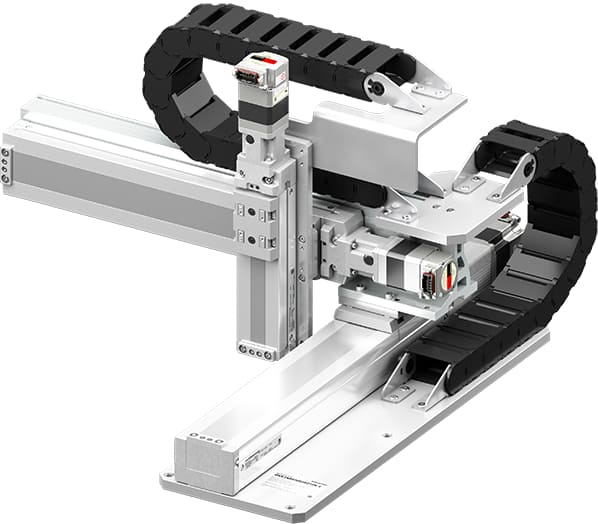 |
MRC01-C是卡氏坐標型機器人專用控制器。
|
|
此控制器用於以下情況:
|
█ 不曾使用PLC進行程序控制經驗的機械設計者,也能輕鬆動作
|
MRC01-C僅使用PC即可輕鬆示教並檢查透過MRC Studio程式設計軟體設定的操作程序。
|
 |
█ 將自製手臂簡易導入至現有系統
|
與MRC01上位控制器的連接由EtherNet/IP™直接控制。小型機器人OVR或內部機器人可以輕鬆添加到現有設備中,而無需對控制系統進行重大更改。
|
|
*MRC01即使連接I/O(無上位控制器)亦可操控。
*MRC01與AZ系列的驅動器間以RS-485通訊控制。 |
備有從自製手臂的初始設定到動作程式皆能簡單設定的「程式設計軟體 MRC Studio」。
此外,亦提供能在購買MRC01前,無須通訊即可測試操控感的程式設計軟體「MRC Studio Simulator」。在實際導入機器人時,可以直接使用透過MRC Studio Simulator建立的程式。
這兩個軟體皆可免費下載。
|
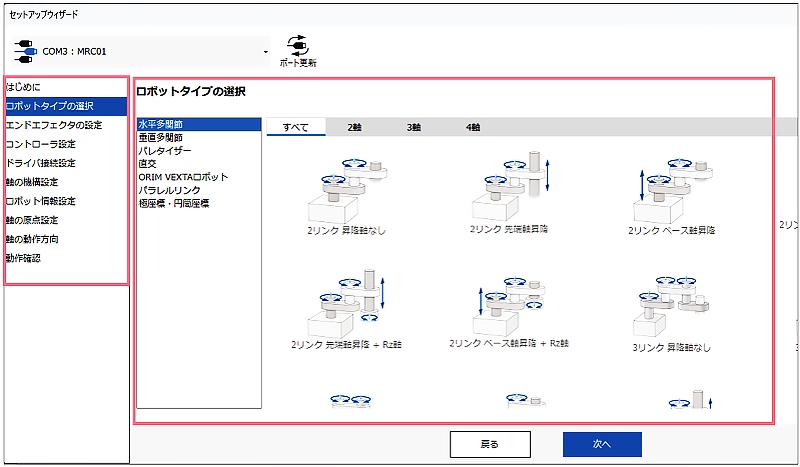
▶ Step1. 按照指南完成初期設定。
|
|
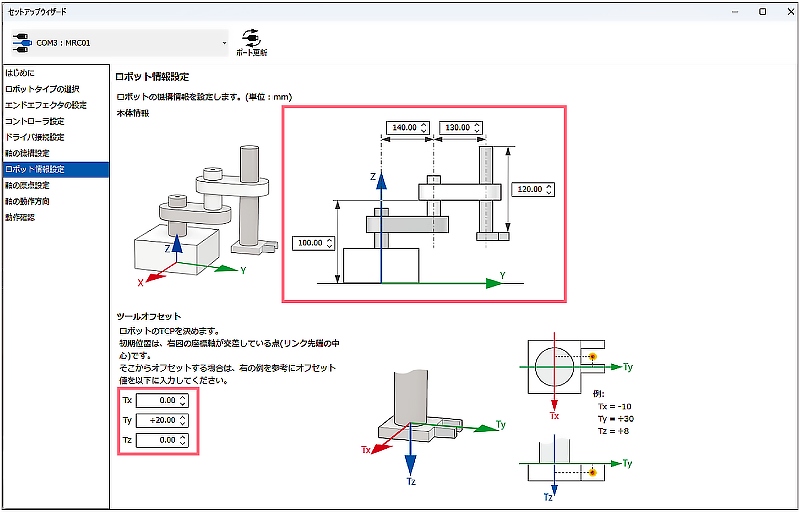
以設定精靈的形式執行一連串的初始設定,包括選擇機器人類型、輸入機構資訊等等。並參考插圖進行操作,依照指南的指示進行設定,即使是第一次操作也能在短時間內完成機器人的初始設定。已預先登入小型機器人OVR的機構資訊,可以更輕鬆地進行初始設定。
|
|
按照步驟設定
|
依照機器人的外形圖、輸入機械手臂的長度等尺寸
|
|
建議按照精靈選單進行機器人的初始設定。 |
直接在插圖內的輸入欄中輸入尺寸。
|
 |
 |
|
選擇機器人形狀
(代表例)
|
|
卡氏坐標型
|
小型機器人OVR
卡氏坐標型 |
|
 |
 |
|
|
XYZ
|
平面龍門 (XY)
|
OVR3AR030030Z10K-C(3軸)
|
|
▶ Step2. 不需階梯圖等相關知識,程式製作方式簡單。
|
|
|
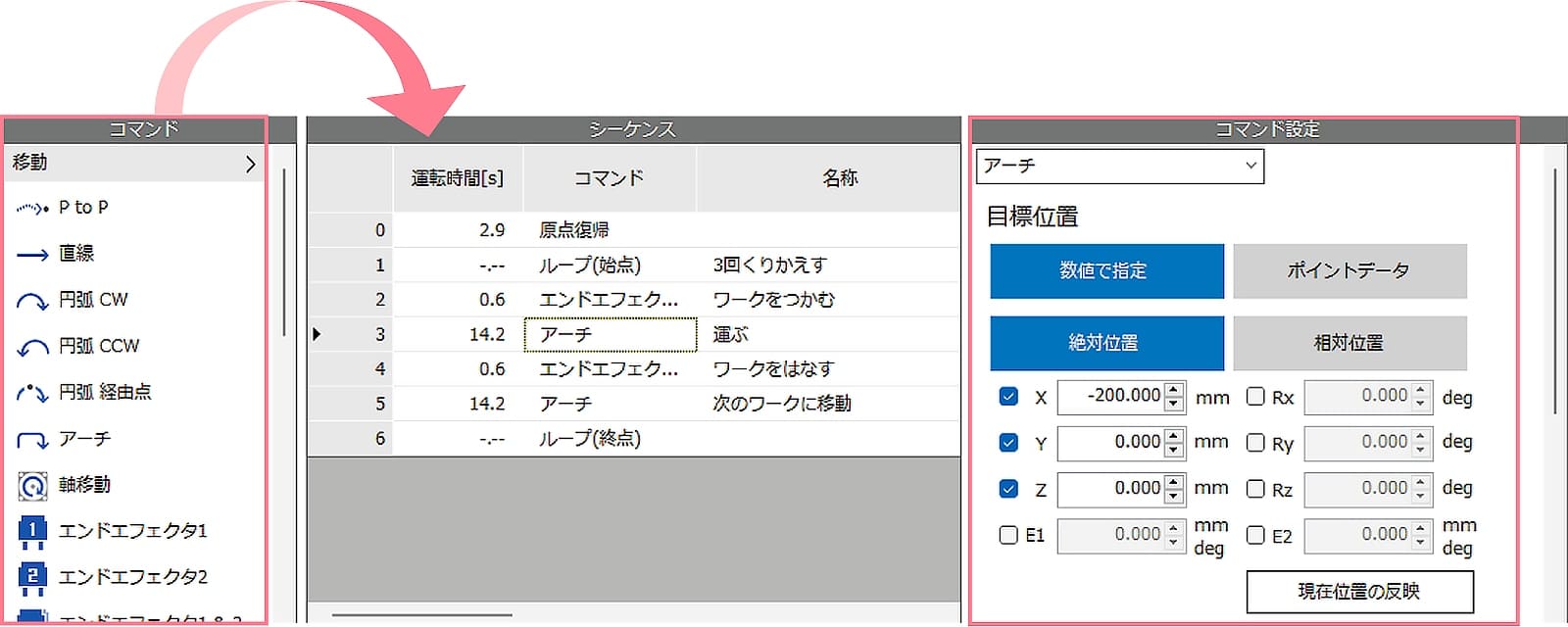
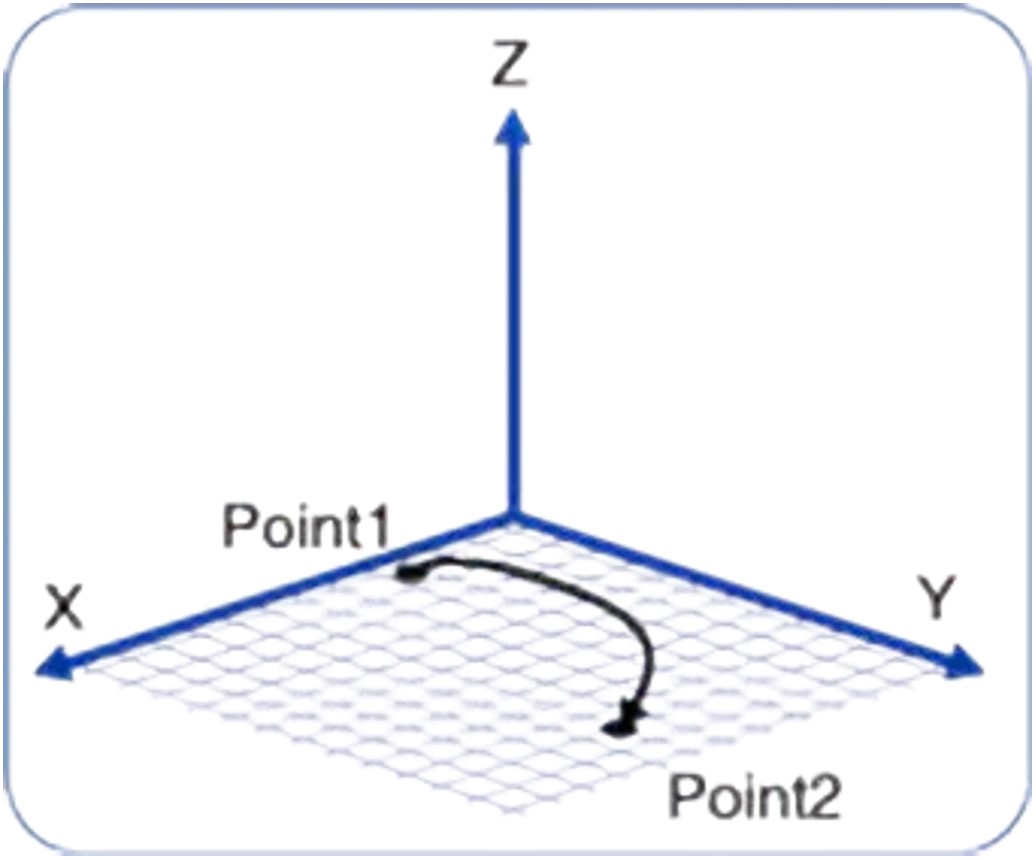
只要依序選擇命令即可。即使不具備階梯圖等專業知識,亦可直覺性製作程式。支援PTP運轉、直線插值進給運轉、圓弧插值進給運轉、弧形運動等。除此之外,亦可從上位控制器藉由EtherNet/IP直接運轉資料。
|
|
|
拖曳需要的命令
|
設定目標位置和轉速
|
|
從「命令」欄選擇需要的動作,拖曳至「程序」欄後,將顯示於「命令設定」欄。
|
將目標位置座標、指定行走距離、轉速輸入命令設定欄內。
|
 |
|
|
命令
|
||||
 |
|
 |
 |
 |
|
PTP控制
|
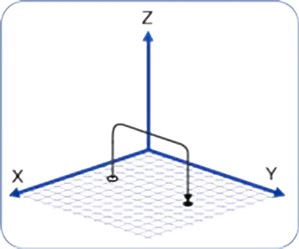
直線插值進給
|
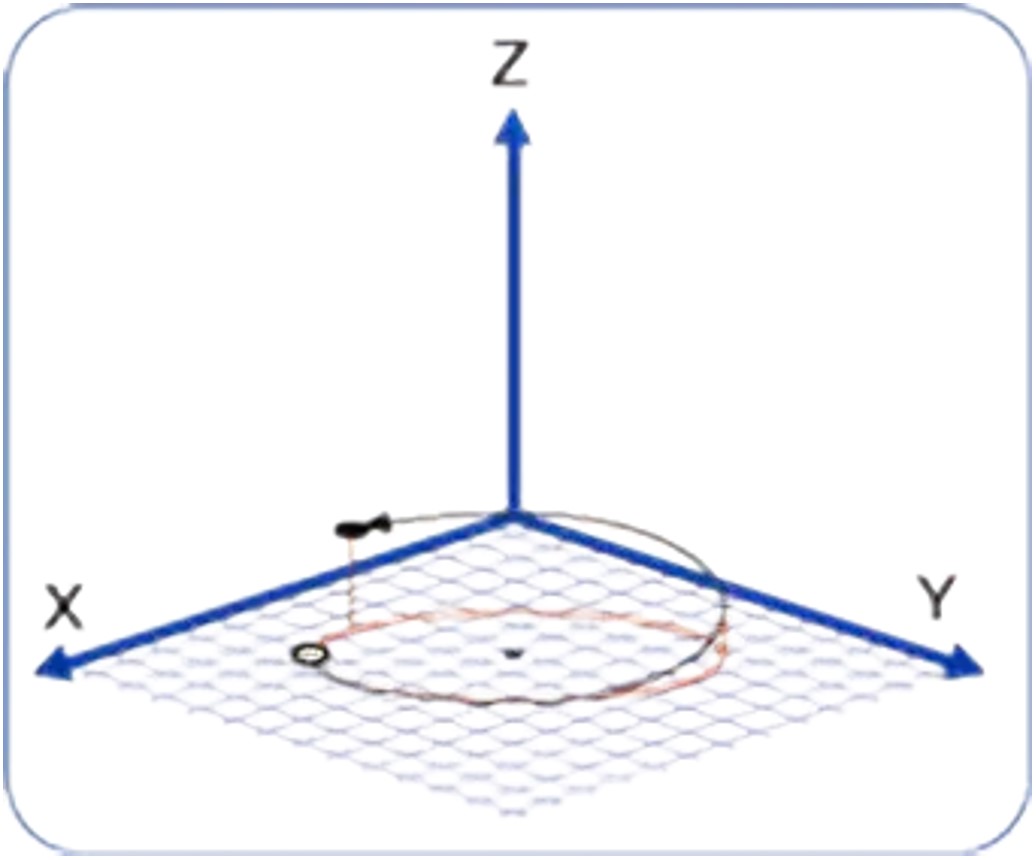
圓弧插值進給(螺旋插值進給)
|
弧形運動
|
疊棧0
|
|
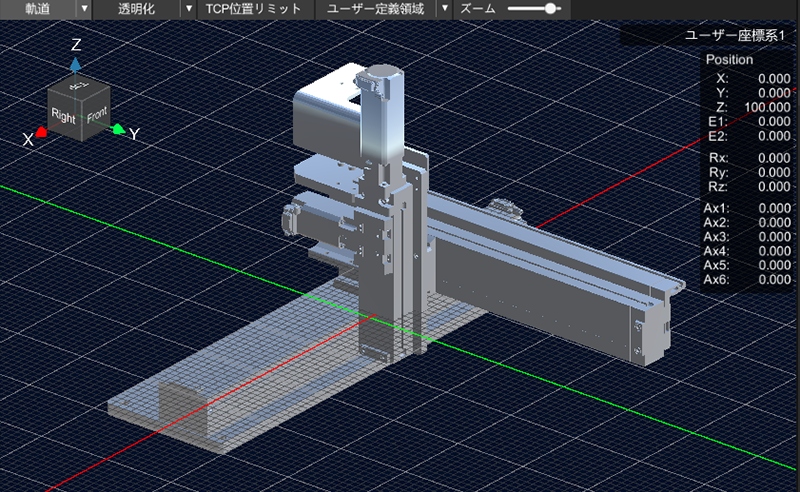
▶ Step3. 以線上3D模擬進行動作確認。
|
||
|
可以顯示程式的執行時間,也可以驗證機器人的可動範圍等的程式內容。
可於3D模擬器上確認機器人的動作程式。於實機動作前可先簡單檢查程式。 *模擬操作與實際操作可能會有差異。
*模擬需要與MRC01-C通訊。
|
||
 |
 |
|
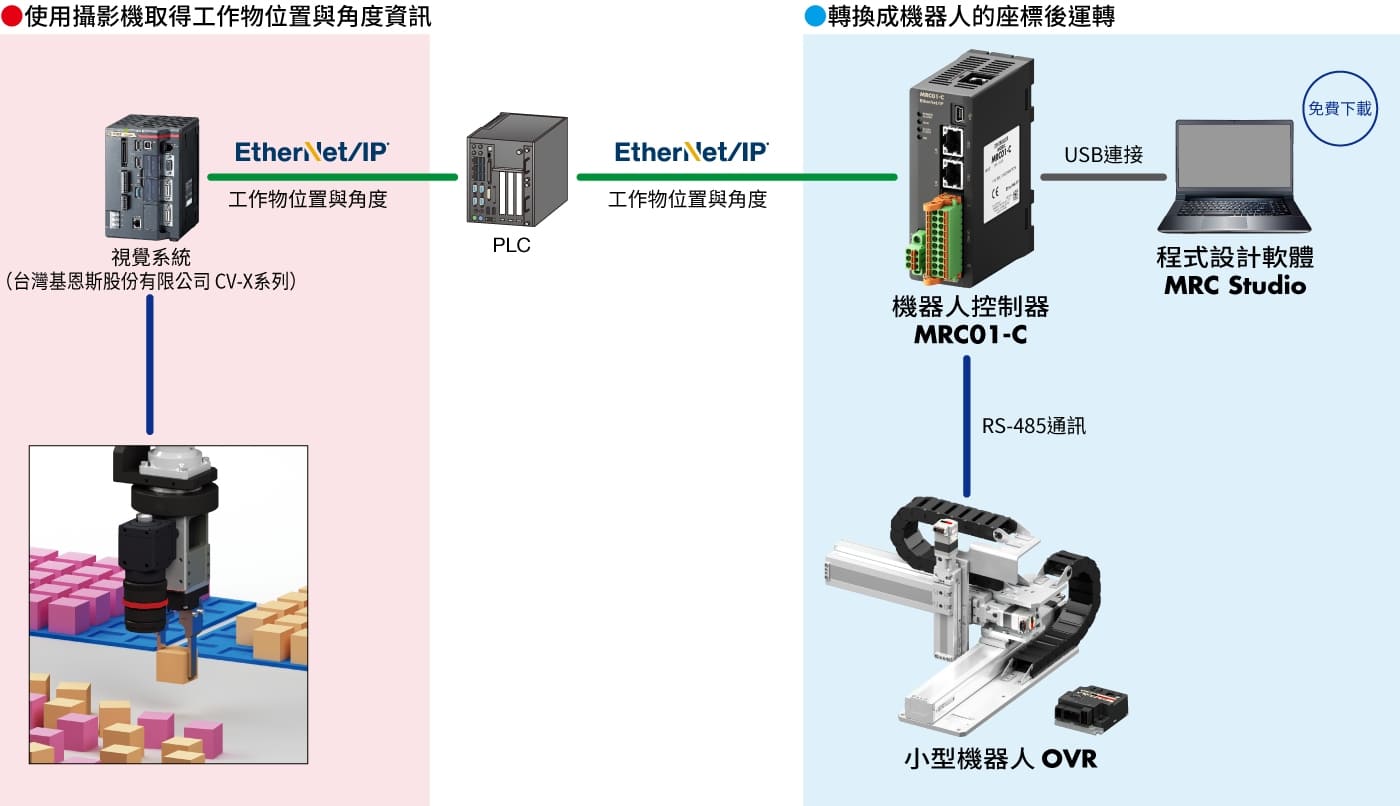
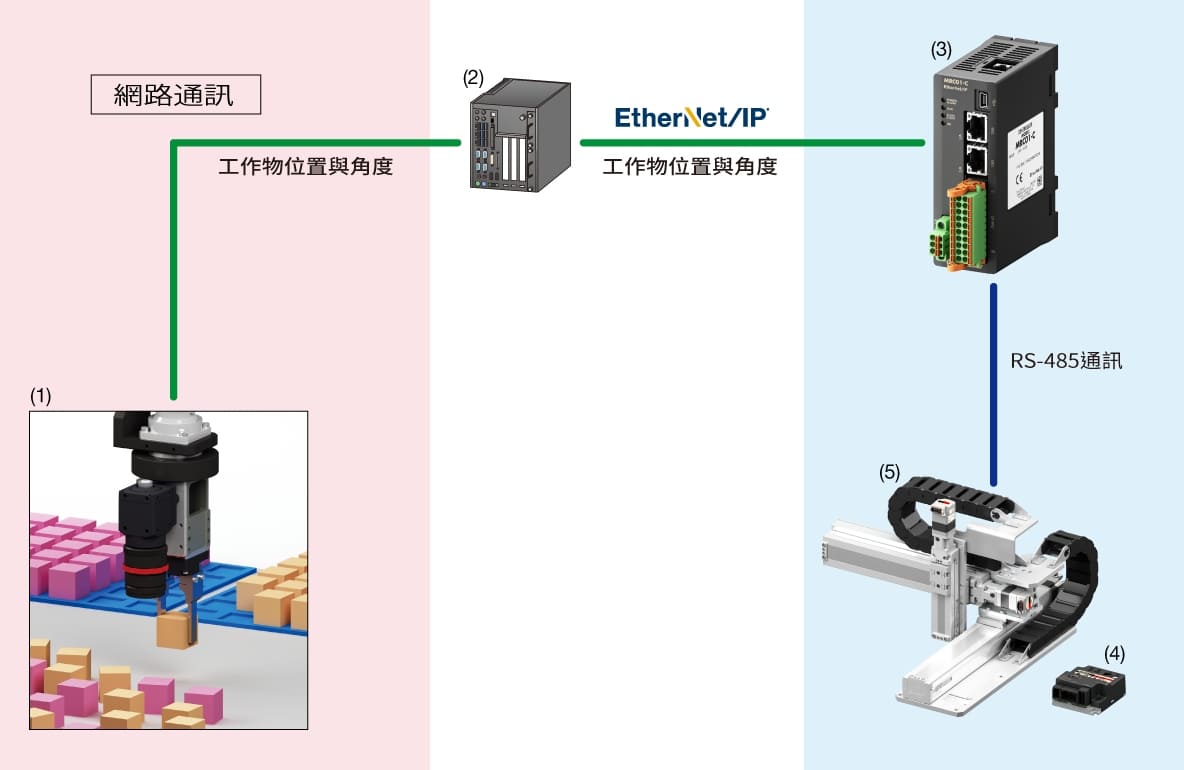
█ 使用2D視覺檢知器建構機器視覺系統
機器人控制器MRC01-C搭載方便的功能,可使用視覺檢知器取得工作物位置與角度資訊,並運用該資訊來運轉機器人。
 |
|
關於影像處理機器、PLC的對應機種
|
關於校正
|
|
上述構成圖是台灣基恩斯股份有限公司製CV-X系列的連接例。 |
為了與2D攝影機連接,請預先使用MRC Studio進行校準。
只要看圖並依照畫面指示操作,即可輕鬆進行設定,
減少補正工時。(最多可校正2台攝影機。)
|
█ 與其他公司的視覺檢知器和影像處理軟體的兼容性
已確認可與MRC01配合使用的視覺檢知器和影像處理軟體。
|
製造商
|
視覺檢知器、處理軟體
|
系統構成範例
|
|---|---|---|
|
KEYENCE
|
XG-X
|
|
|
CV-X
|
||
|
VS-L
|
||
|
三菱電機
|
VS80
|
|
|
COGNEX
|
洞察2800M
|
|
|
洞察8000
|
||
|
MVTec軟體
|
MERLIC
|
|
|
HALCON
|
||
|
CKD
|
Facilea
|
|
機器人視覺系統的一般配置範例。
|
|
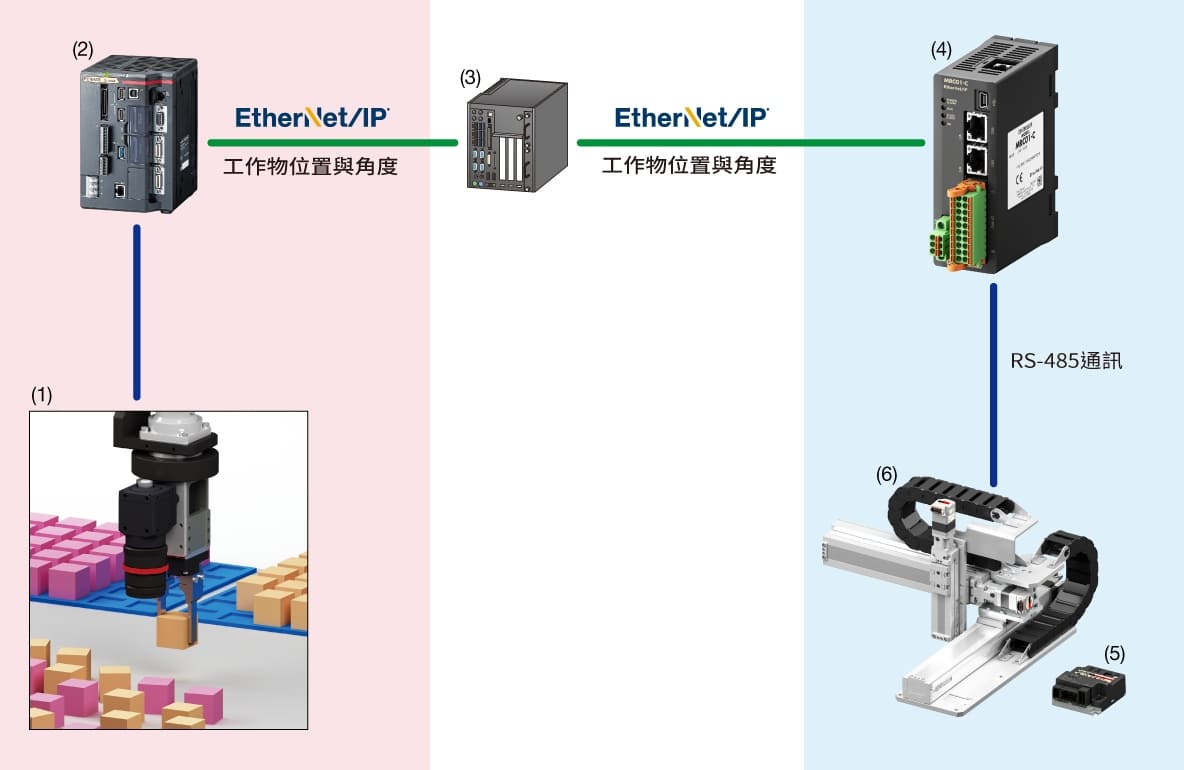 |
機器人視覺系統的一般配置範例:
準備設備
|
|
攝影機控制器內建於攝影機中的構成例。
可以進行簡單的系統配置。 |
|
 |
準備設備
 影像處理軟體螢幕(範例:COGNEX)
|
|
在PC(軟體)上執行攝影機控制器功能的配置範例。 |
|
 |
準備設備
*如有需要,請做好準備。
 影像處理軟體螢幕(範例:MERLIC)
|
▌應用例
與2D攝影機配合可實現多種自動化,例如檢知工作物的位置資訊、尺寸、外觀檢查等。以下舉例介紹。
|
位置修正
|
顏色識別
|
|
整齊排列雜亂的工作物(固定攝影方式)
|
篩選不同顏色的工作物(Hand-Eye方式)
|
在多個作業區域反覆進行相同作業時相當有效。無須改變運轉程式,即可變更作業的起點。
|
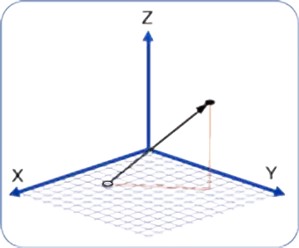
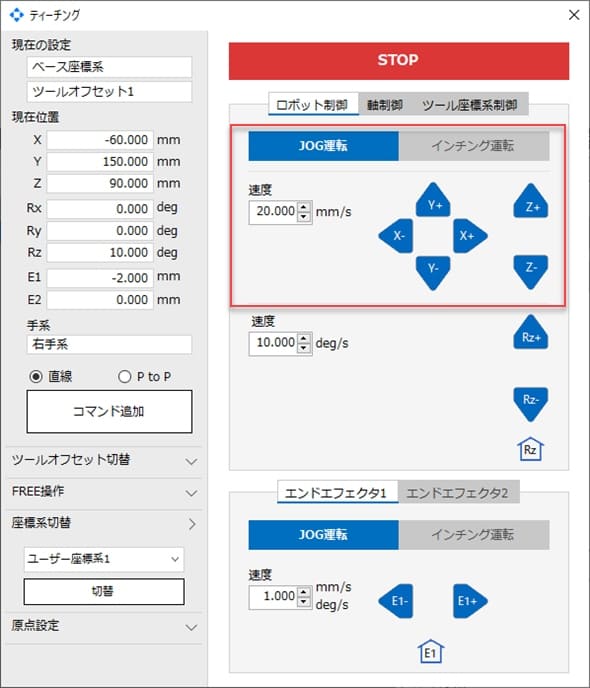
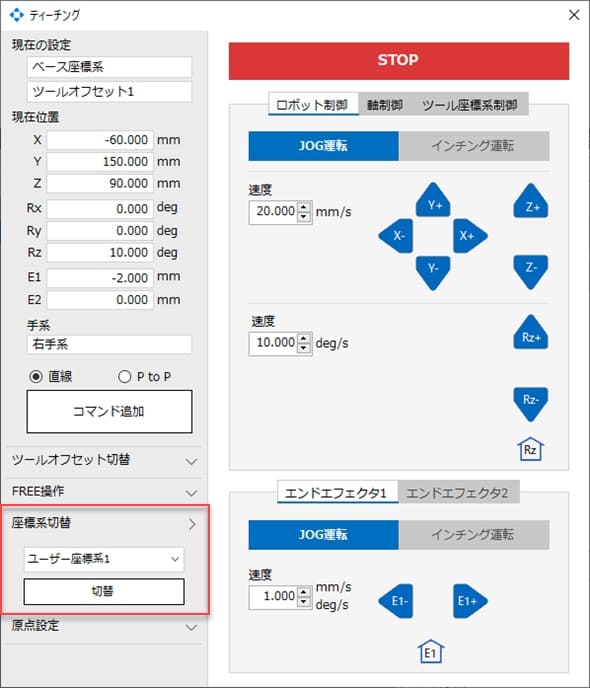
█ 從示教畫面設定座標系統
|
||
|
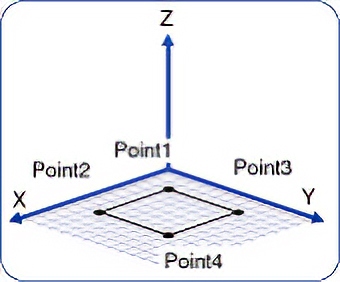
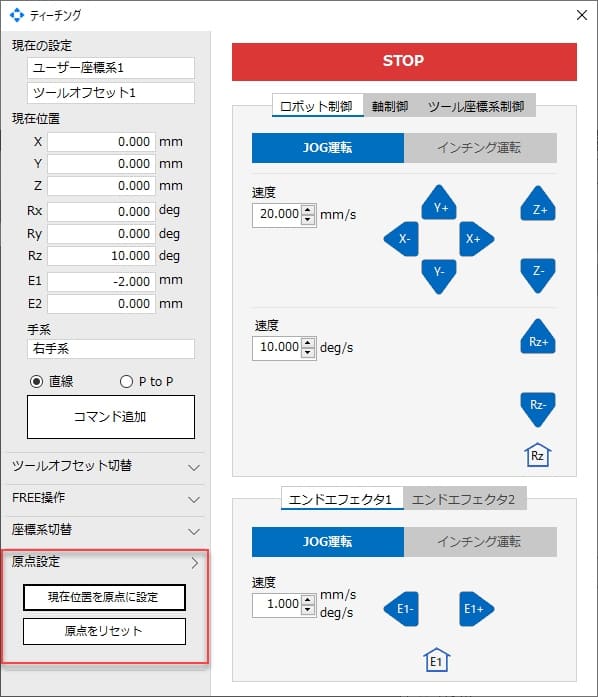
最多可以設定三個任意位置作為原點。從MRC Studio的示教畫面進行設定。
|
||
 |
 |
 |
|
將機器人移動至設定為原點的位置
|
選擇座標系
|
將現在位置設定為原點
|
|
█ 可輕鬆在1組程式內切換
|
|
也可使用運轉程式的座標系統切換命令來變更座標系統。1組程式中可新增多個座標系統切換命令。
|
|
我們提供了MRC Studio Simulator,即使沒有與機器人控制器MRC01-C進行通訊,也可以模擬實際動作。
在MRC Studio Simulator中創建的運行程序,可以在實際導入機器人時直接使用。 |
 |
█ MRC Studio Simulator和MRC Studio(產品版)之間的差異
這兩個軟體皆可免費下載。功能上的差異如下。
|
項目
|
MRC Studio Simulator
|
MRC Studio(產品版)
|
|
與機器人控制器MRC01-C的通訊
|
-
|
○
|
|
設定
|
△
無法設定與機器人控制器MRC01-C、或驅動程式的通訊項目。
|
○
|
|
將設定資料檔案保存至PC
|
○
|
○
|
|
開啟檔案
|
○
可以開啟.mrcxt檔案。
另外提供設計軟體的範例檔案。 |
○
可以開啟.mrcx檔案。
|
|
匯入由MRC Studio Simulator作成的數據檔案
|
-
|
○*
|
|
使用說明
|
○
|
○
|
|
作成運轉程式
|
○
|
○
|
|
測試運轉
|
○
|
○
|
|
參數設定
|
△
部分參數無法設定。
請參閱 MRC Studio Simulator 的 [幫助]→[顯示用法] 獲取詳細信息 |
○
|
|
監視
|
△
以下是可以在監視器中查看的內容:
需要連接外部設備的信號系統信息無法監控。 |
○
|
|
*在MRC Studio Simulator中並未考量各軸的負載條件,因此實際動作可能會有所差異。
建議首次操作實機時,降低運轉速度進行測試。 |
||
|
產品規格
|
|
控制器型
|
機器人控制器
|
|
上位網路種類
|
EtherNet/IP
|
|
界面 控制輸入
|
8點、光耦合器
|
|
界面 控制輸出
|
8點、光耦合器·開集極
|
|
RS-485通訊規格 電氣特性
|
Modbus RTU
以EIA-485 為基準、Straight cable使用雙絞線 (推薦TIA/EIA-568B CAT5e 以上),總延長距離控制在50 m 以內。 ∗1 |
|
USB連接器 規格
|
USB2.0 (全速)
|
|
USB連接器 電纜線
|
長度: 3 m以下
形狀: A to mini B |
|
設定工具
|
程式設計軟體 MRC Studio
|
|
控制軸數
|
最大6軸 ∗2
|
|
機器人型號
|
直交 (2軸,3軸),直交-平面起重臺架 (2軸,3軸)
|
|
驅動命令
|
P to P,直線插補,圓弧補間,拱形插補,命令面板 (P to P,直線,拱形)
|
|
監視
|
機器人圖、Alarm、Information等
|
|
電源輸入 電壓
|
DC24 V ±10%
|
|
電源輸入 電流
|
0.2 A
|
|
重量
|
0.12 kg
|
∗1. 配線、配置不同,馬達電纜線和電源電纜線所產生的雜訊造成問題時,請進行屏蔽或使用鐵氧體磁芯。
∗2. 包括末端軸的軸數。無論機器人類型如何,可控制的末端軸最多為2軸。
控制器只能控制1台機器人。例如,如果2軸型 (XY) 卡氏坐標型機器人也控制末端軸 (1軸),則 控 制軸數將為3軸。
控制器只能控制1台機器人。例如,如果2軸型 (XY) 卡氏坐標型機器人也控制末端軸 (1軸),則 控 制軸數將為3軸。
如需產品圖檔,請洽廣億科技服務人員,謝謝!