

東方馬達
Oriental motor
步進馬達PKP系列
CVD系列RS-485通訊型驅動器
CVD RS-485通訊型 系列
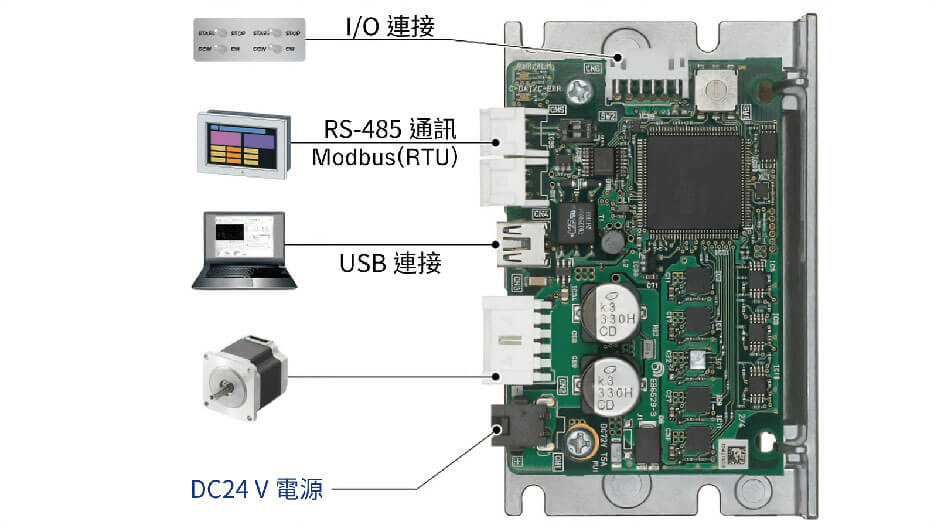
希望以Modbus(RTU)控制運作步進馬達。希望以人機介面簡單設定資料。因應這類需求的馬達及對應RS-485通訊的驅動器。上位控制機器1台最多能夠連接31軸驅動器,並進行控制。
內容大綱 (點擊展開)
介紹關於低振動・高轉矩・高效率化。
▎低振動
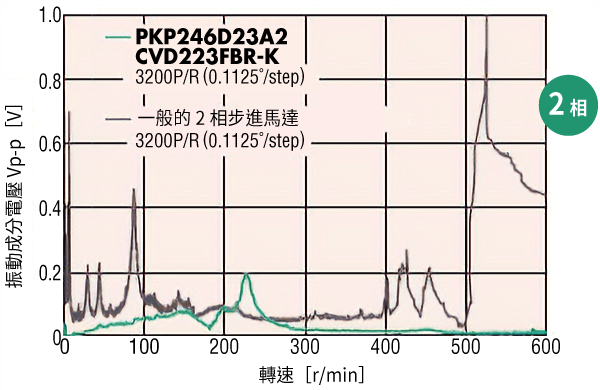
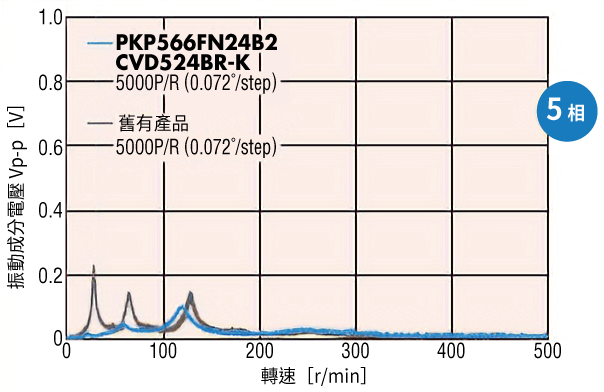
透過全數位控制的微步級驅動,大幅改善振動等級,在全速度領域實現低振動化。
| 全速度領域內的振動特性皆大幅改善 | 5相馬達能更進一步降低振動 |
 |
 |
▎更高轉矩
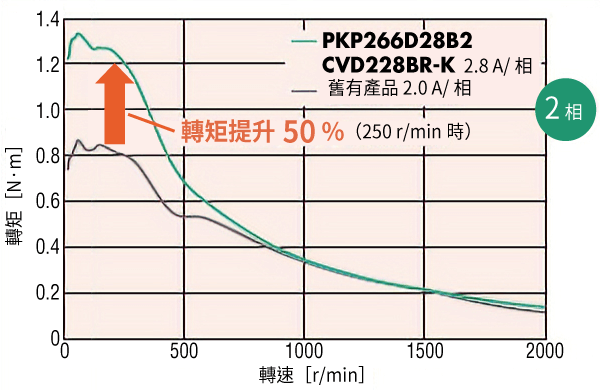
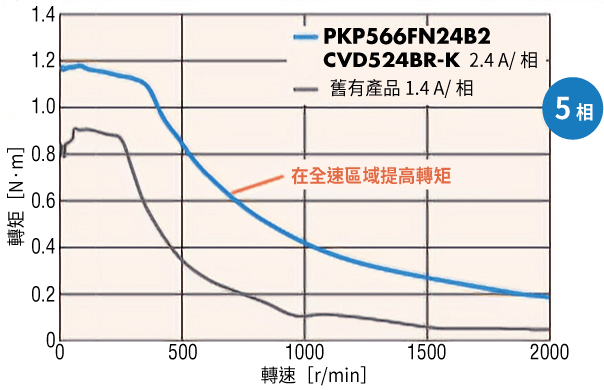
藉由驅動回路高效率化達成高電流的驅動器與重新檢視線圈設計的馬達組合,實現高轉矩化。
.PKP系列馬達:PKP系列馬達:透過重新設計線圈來達成高轉矩化
.CVD系列驅動器:CVD系列 驅動器:透過驅動回路的高效率化,實現高電流驅動的可能性
.PKP系列馬達:PKP系列馬達:透過重新設計線圈來達成高轉矩化
.CVD系列驅動器:CVD系列 驅動器:透過驅動回路的高效率化,實現高電流驅動的可能性
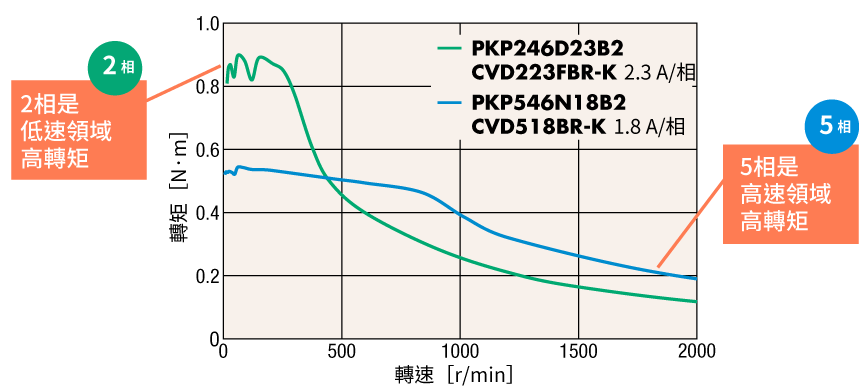
| 2相馬達 低速領域高轉矩 | 5相馬達 在全速區域提高轉矩 |
 |
 |
▎高效率設計
CVD系列與舊有產品相比增加輸出電流,實現高轉矩化。為能增加輸出電流,採用了顧慮到可減低發熱量的設計。
▎業界最小等級的高性能驅動器
小巧輕便的驅動器有助於節省空間。2相與5相驅動器的尺寸、安裝、I/O及電源連接器都相同。
 |
 |
| 尺寸 | 重量 |
| W 85 mm × D 52.5 mm × H 24.5 mm | 70 g |
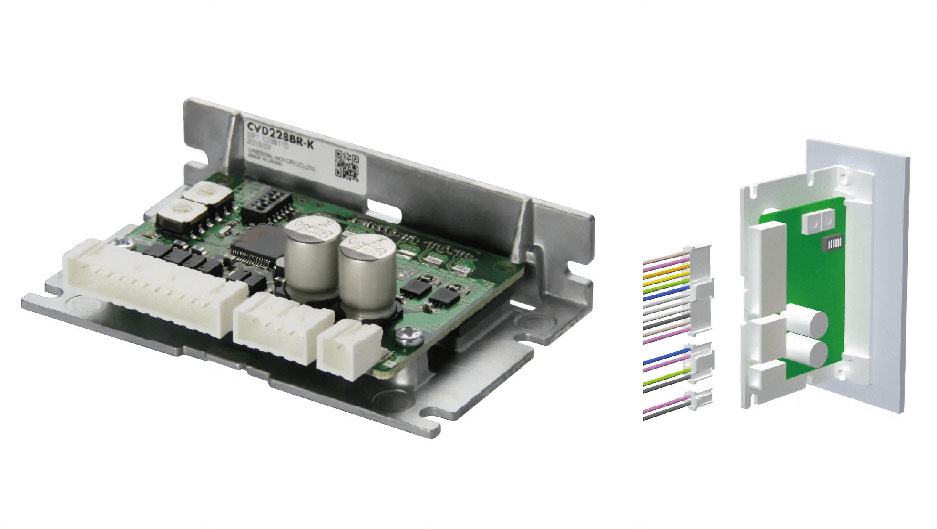
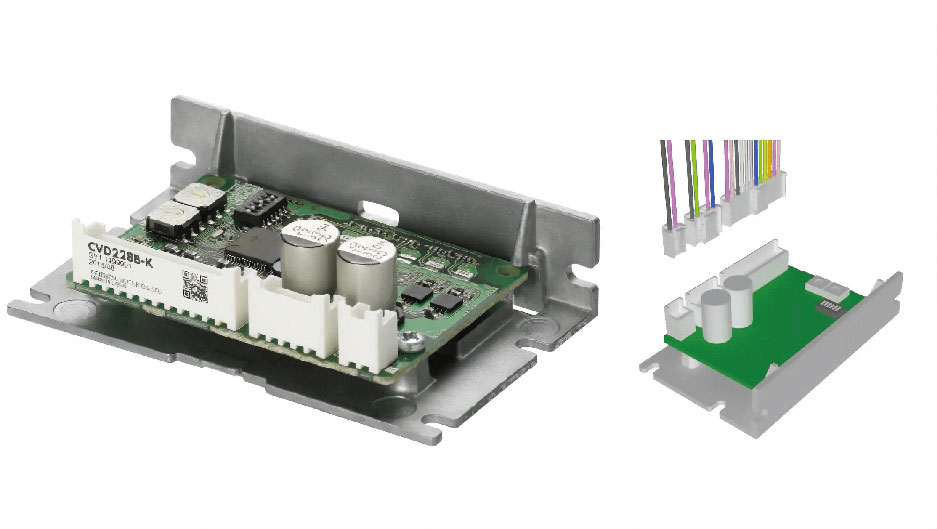
▎可配合設置方式選購的驅動器
配合設置方式,備有出力軸形狀、連接器方向不同的驅動器。
| 水平式連接器附安裝板連 接器為橫向。 |
附安裝板 接器為朝上。 |
 |
 |
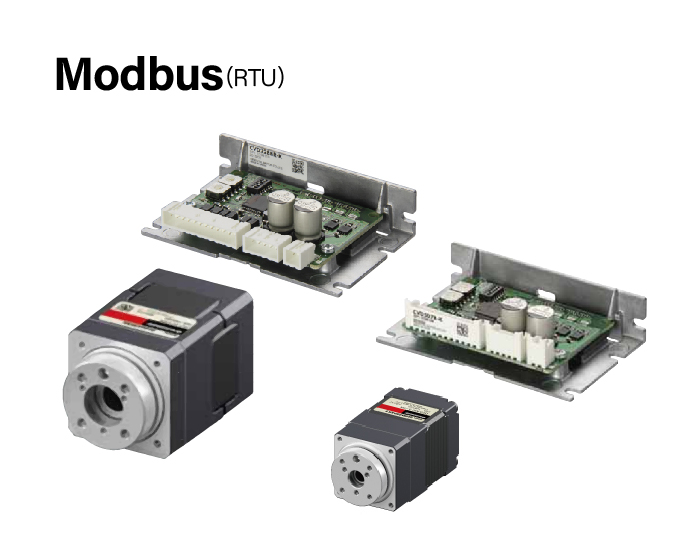
▎Modbus(RTU)對應
由於對應Modbus(RTU),可以使用各種上位控制器,如PLC、PC、人機介面等進行控制。
 |
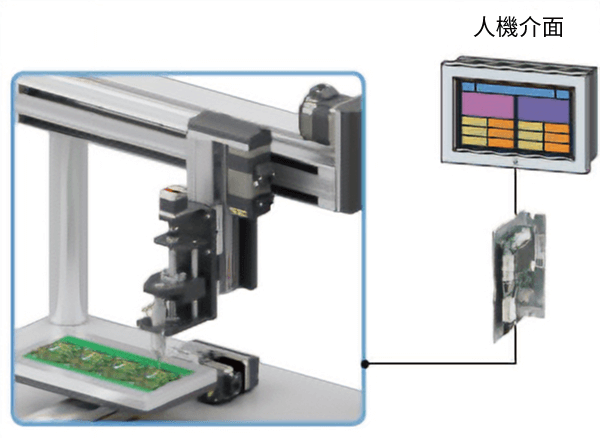 |
| 以Modbus(RTU)控制 | .可設定運轉資料和參數,並可輸入運轉指令。 .搭載監視功能。 |
| 最多可連接31軸 | .上位控制器1台最多能夠連接31軸驅動器。 |
| 無需脈衝產生器 | .最多可設定256筆運轉資料。 |
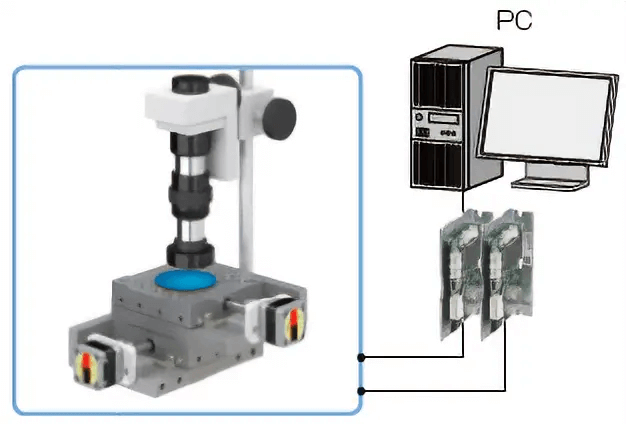
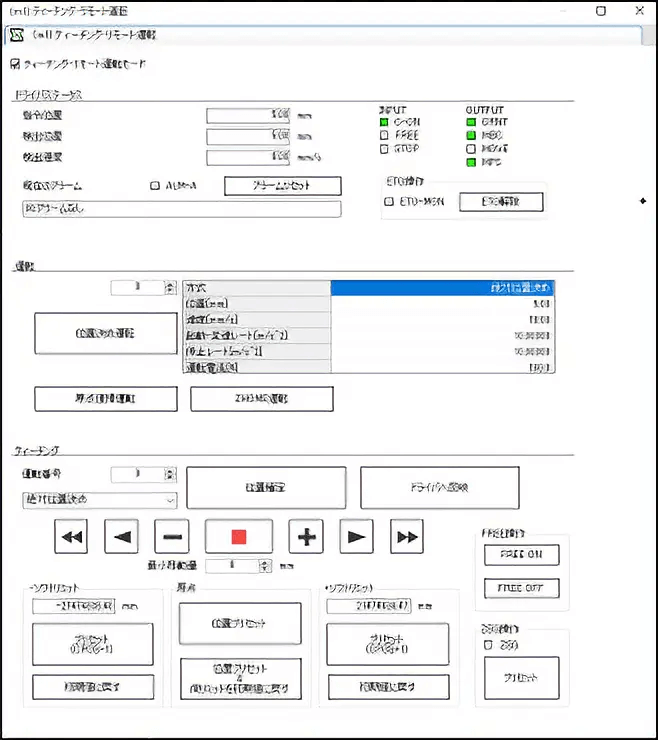
▎使用支援軟體 MEXE02從電腦簡單驅動
透過支援軟體MEXE02可設定和編輯運轉資料或參數。具有測試運轉及監視等功能。支援軟體可至本公司網站免費下載。
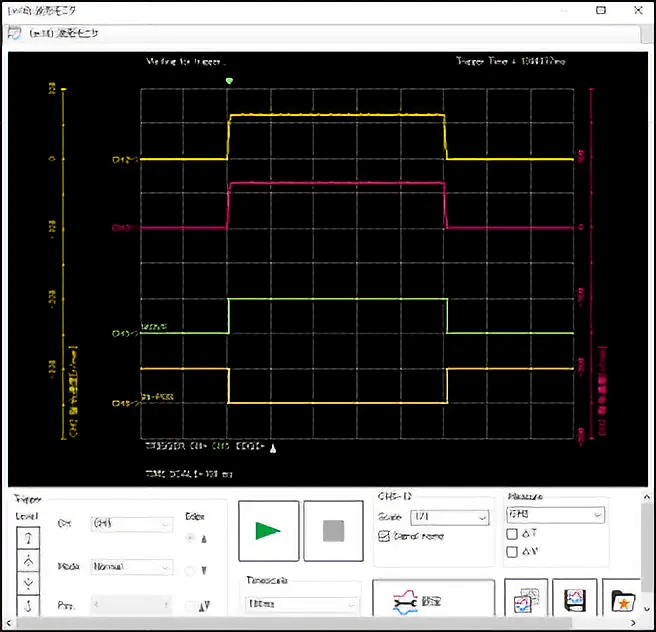
| 從PC進行示教 | 亦有搭載可確認信號輸入狀況的波形監視 |
 |
 |
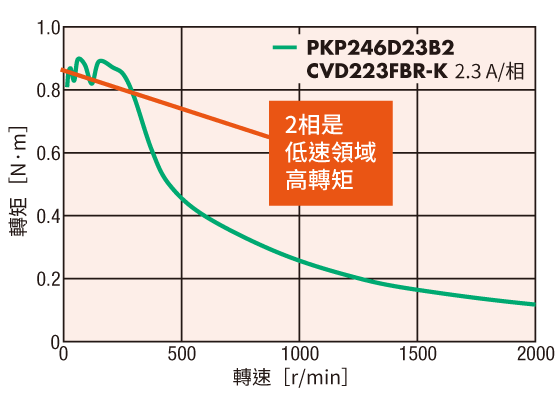
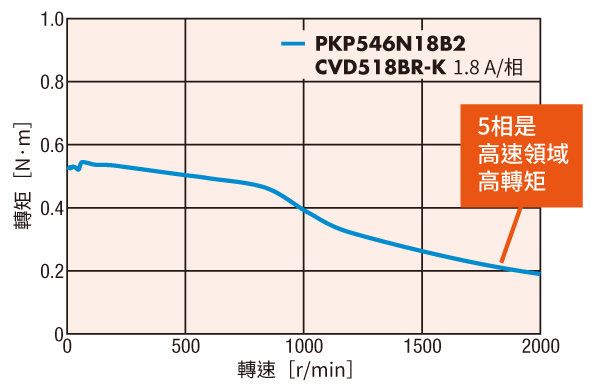
2相步進馬達大幅提升低速領域的轉矩,而5相步進馬達則主要大幅提升高速領域的轉矩。可從廣泛的速度、轉矩領域中,選用符合需求規格的馬達。
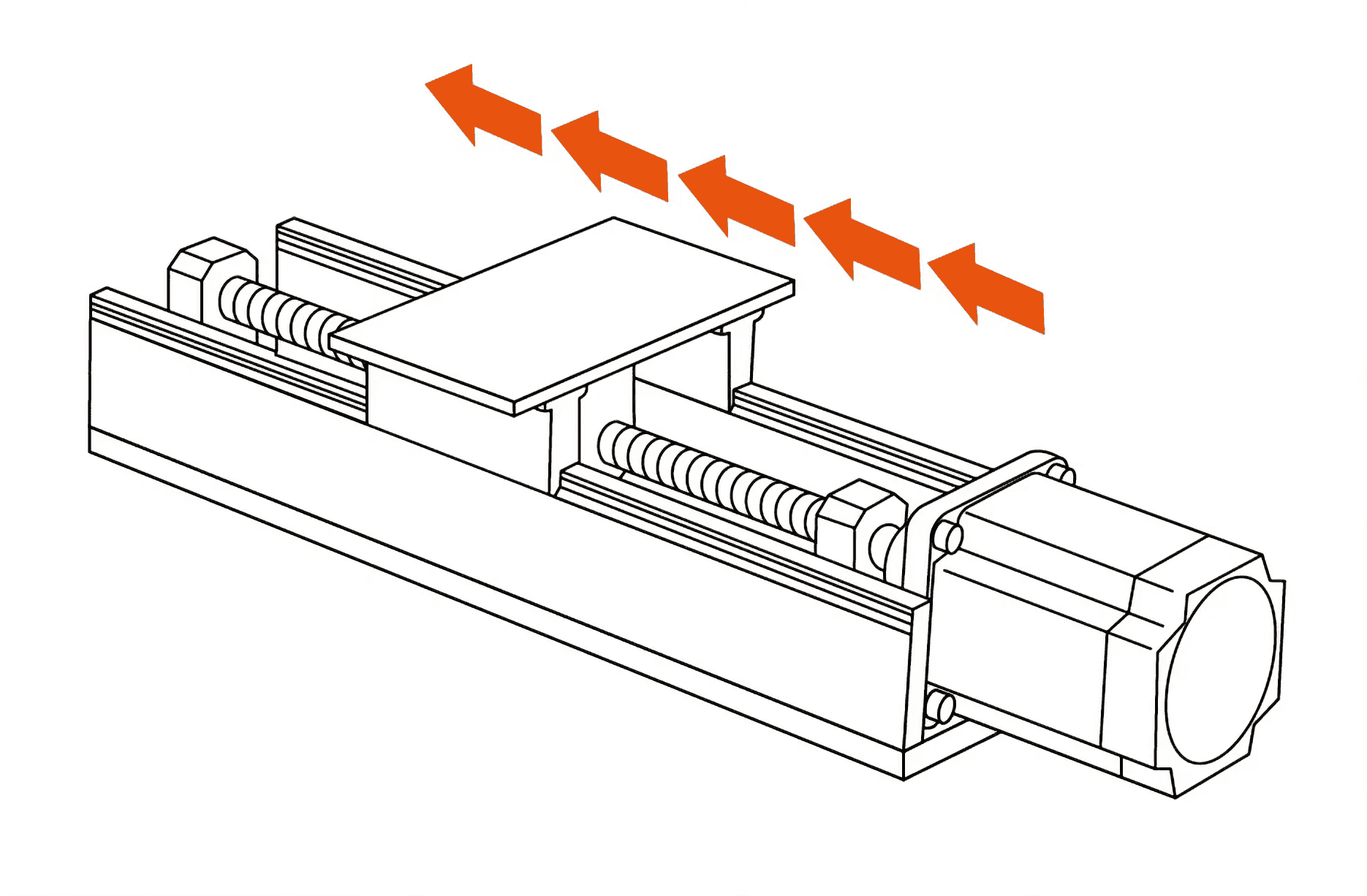
▎用途例 短距離寸動運轉。
需要緊急加減速的用途,建議使用低速時轉矩較高的2相步進馬達。
 |
 |
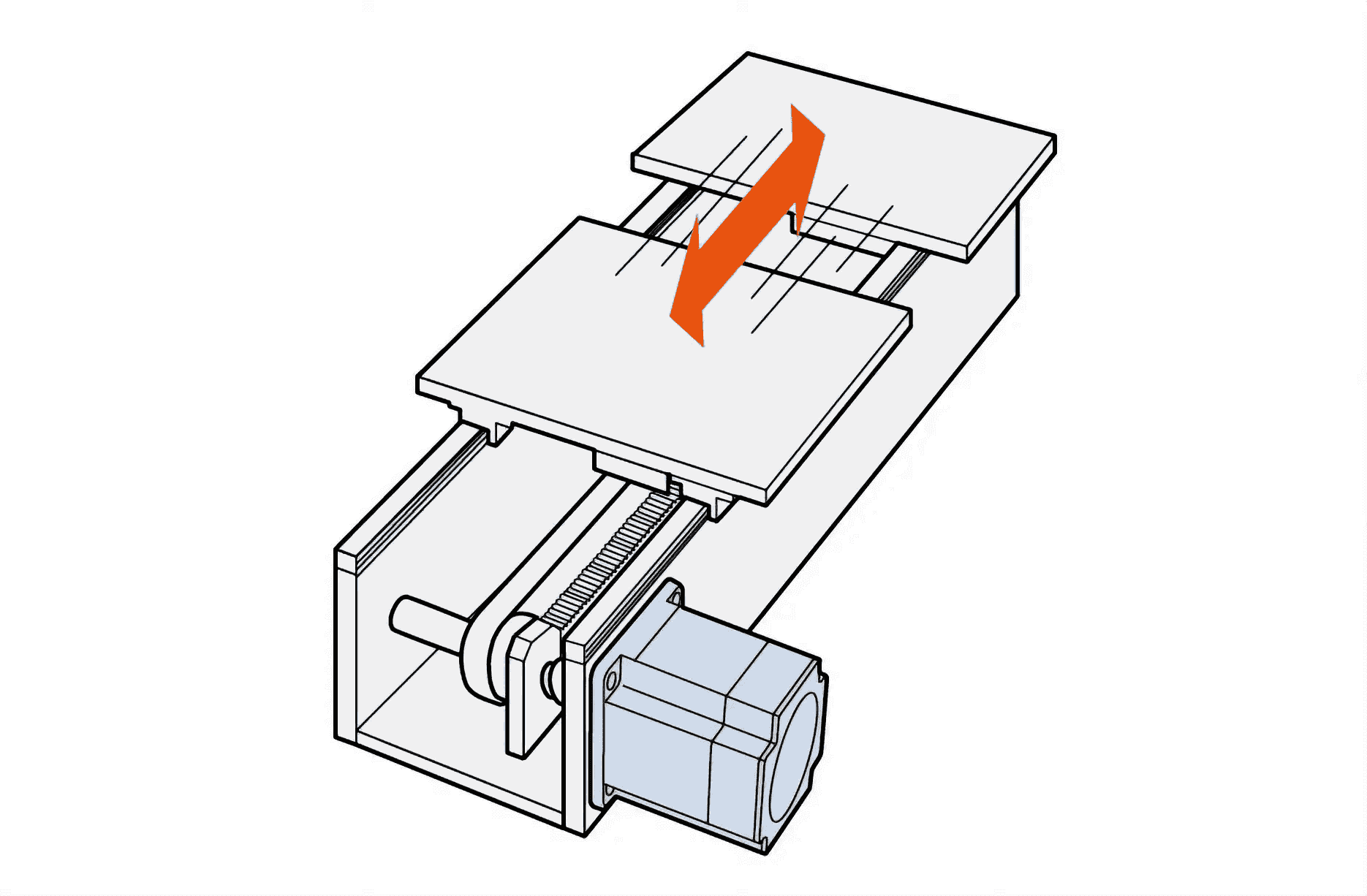
▎用途例 長距離往復運轉。
需要長定位的用途,建議使用高速轉矩較高的5相步進馬達。
 |
 |
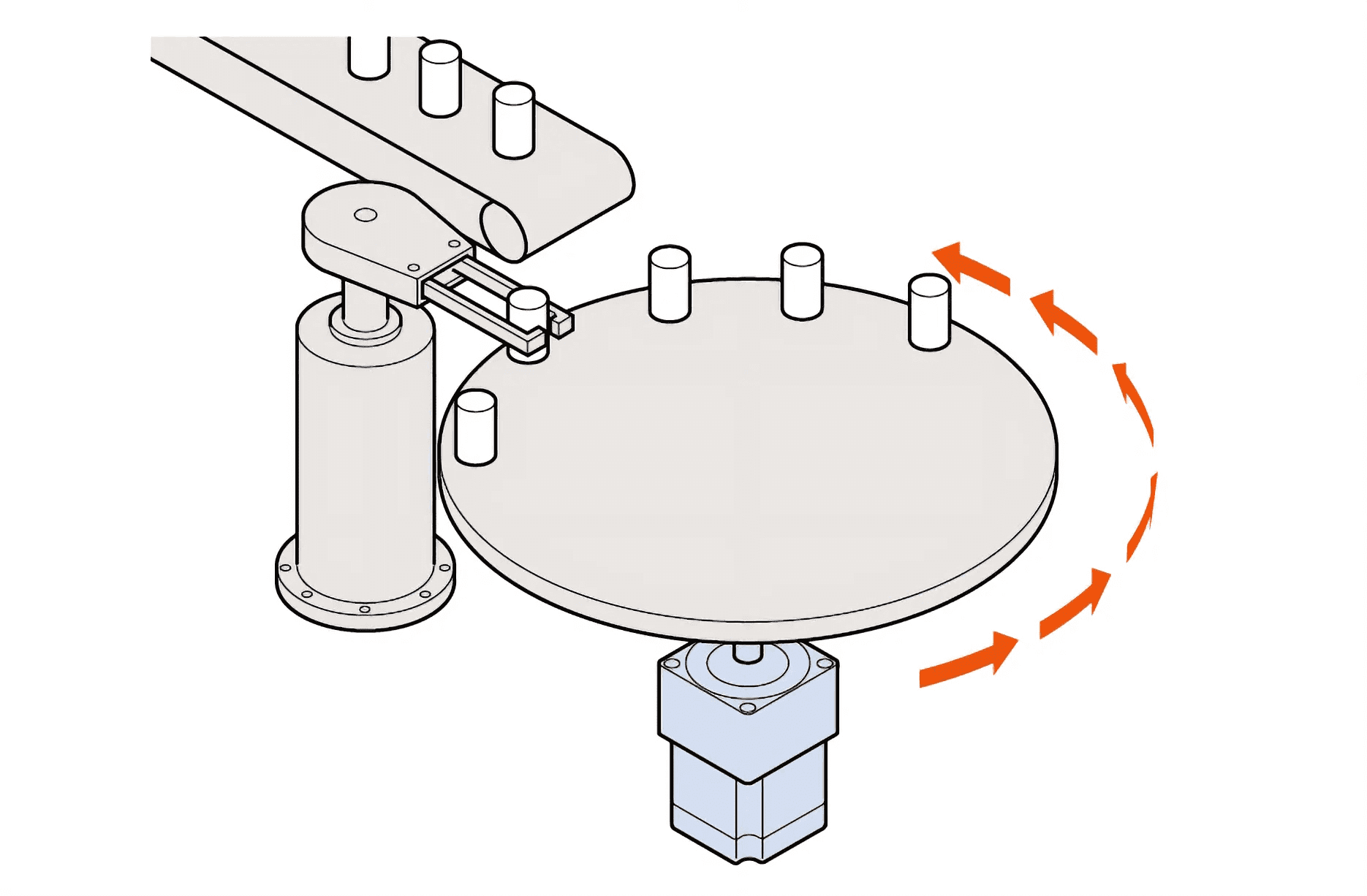
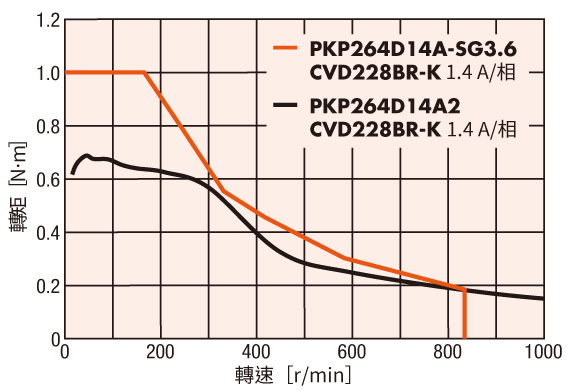
▎用途例 將大的慣性在短距離寸動運轉。
需要將大的慣性急速加減速的用途,建議2相步進馬達的減速機型馬達。
 |
 |
|
 |
 |
 |
|||
| 步進馬達PKP系列/CVD系列 脈波列輸入型驅動器 | 2相步進馬達用雙極驅動器/5相步進馬達用驅動器 CVD系列S型 |
步進馬達PKP系列/CVD系列 SC型驅動器 | 中空旋轉平台DH系列 | |||
| 希望以脈波列輸入輕鬆使步進馬達運轉。這是符合此需求的馬達和脈波列輸入驅動器。進一步追求高效率設計、高轉矩、低振動,以獲得更好的性能。 | 2相與5相步進馬達驅動用DC電源輸入驅動器。備有基板型的小型驅動器,包括使用SPI通訊控制馬達定位的驅動器、以及通過脈波列控制的驅動器。 | 可不使用脈波產生器,透過輸入正轉、逆轉,輕鬆進行速度控制。如同調速馬達般的使用方式。系統構成簡單,僅有5相馬達、驅動器與可程式控制器。 | 此為在5相步進馬達出力軸中採用中空凸緣的模組產品。可直接將負載安裝在中空凸緣上。可於中空部進行空氣配管、配線或使光線穿透。 |
延伸閱讀
應用案例
▎2相步進馬達
| 分類 | 機種 | 安裝尺寸 mm |
高基本步級角 [°] |
附加功能 |
| 無減速機 |
標準
|
13~85 | 1.8 | 編碼器、 電磁剎車 |
|
高解析度
|
28~56.4 | 0.9 | 編碼器、 電磁剎車 |
|
|
薄型
|
42、60 | 1.8 | 無 | |
| 附減速機 |
SH減速機
|
28~90 | 0.05~0.5 | 編碼器 |
|
CS減速機
|
28~60 | 0.09~0.36 | 無 | |
|
薄型諧和式減速機
|
51、61 | 0.018~0.036 | 無 |





▎5相步進馬達
| 分類 | 機種 | 安裝尺寸 mm |
高基本步級角 [°] |
附加功能 |
| 無減速機 |
標準
|
20~85 | 0.72 | 編碼器 |
|
高解析度
|
28、42、60 | 0.36 | 編碼器 | |
| 附減速機 |
TS減速機
|
42、60 | 0.024~0.2 | 無 |

如需產品圖檔,請洽廣億科技服務人員,謝謝!