
| 主要特徵 | 驅動器的特徵及種類 | 用途例、方便的使用方法 |
能以1%為單位調整運轉電流,因此可透過夾持力微調及低速運轉靠近工作物等方式,實現細緻的抓取動作。
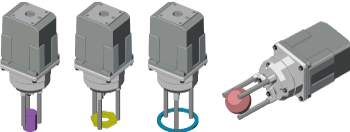
1. 抓取
可夾持容易受損或變形的工作物。
 |
3爪型可夾持球體形狀的柔軟海綿、圓形且容易變形的鏡頭、圓筒形的玻璃瓶等工作物。
 |
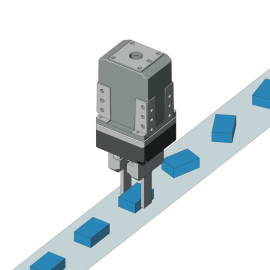
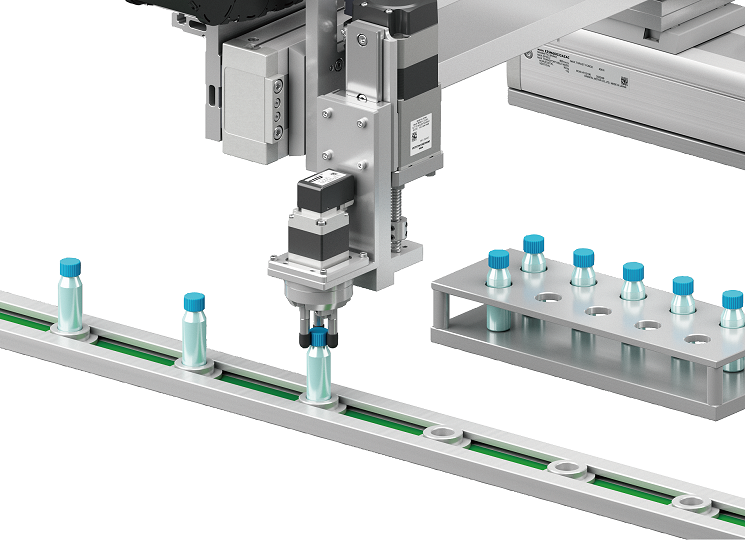
2. 排列
可讓工作物的方向及位置整齊劃一。
 |
 |
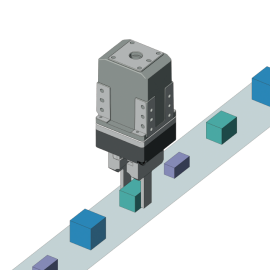
3. 測量
可判別工作物大小、測量尺寸。
 |
█ 內藏無需電池的絕對式編碼器,無需外部檢知器也能隨時監視馬達位置資訊
█ 藉由閉回路控制達到高穩定性
█ 具有高效率,可減低馬達發熱、實現節能
 |
█ 2爪型與3爪型的比較
| 種類 | 2爪※1 | 3爪 | ||||||||||||
| 適合夾持的 工作物形狀 |
方形
|
圓筒形、複雜的形狀、球形
|
||||||||||||
| 可動範圍 | 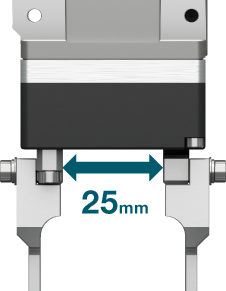 |
|
||||||||||||
| 最大夾持力[N] | 25 | 27 | ||||||||||||
| 容許載重[N] (容許推力載重[N] ※2) |
5 | 15 | ||||||||||||
| 重量[kg] | 0.38 | 0.38(附安裝外蓋) 0.28(無安裝外蓋) |
||||||||||||






※1 規格為型號4的值。
※2 為3爪型時。
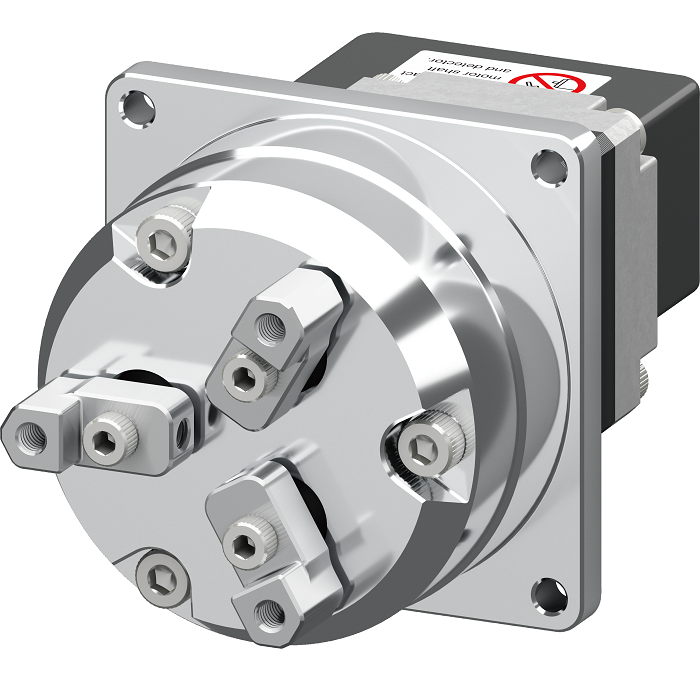
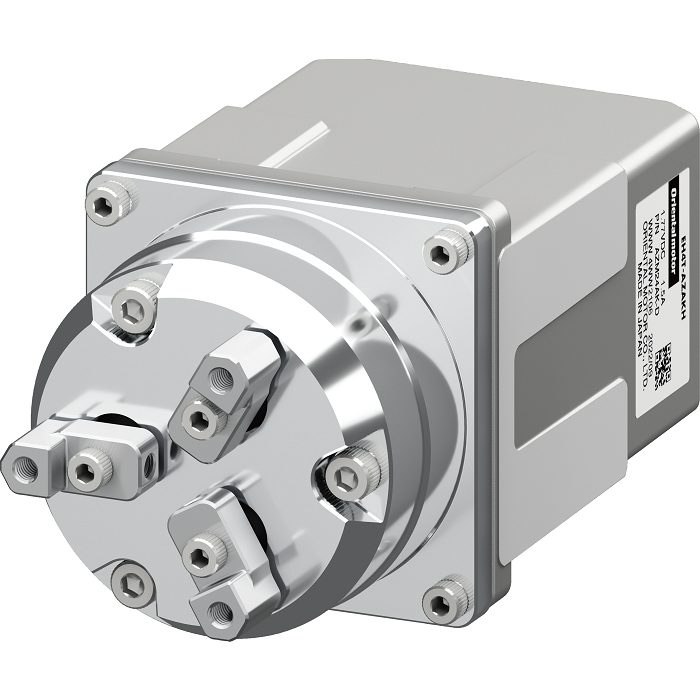
3爪型可於各爪運轉時開關夾持工作物。可夾持球形、圓筒形工作物的外徑,亦可夾持環形工作物的內徑。
 |
此外,容許載重為15N,作為末端軸的剛性高,可提升機器人和設備整體規格。
 |
▎可配合上位系統選購的驅動器
可配合客戶所使用的上位系統選購驅動器。
█ 內藏定位功能型
將運轉資料設定在驅動器中,從上位選擇並執行運轉資料的機種。與上位的連接、控制是利用I/O、Modbus(RTU)/RS-485通訊、FA網路的其中之一進行。藉由使用網路轉換器(另售),可透過CC-Link通訊與MECHATROLINK通訊、EtherCAT通訊進行控制。
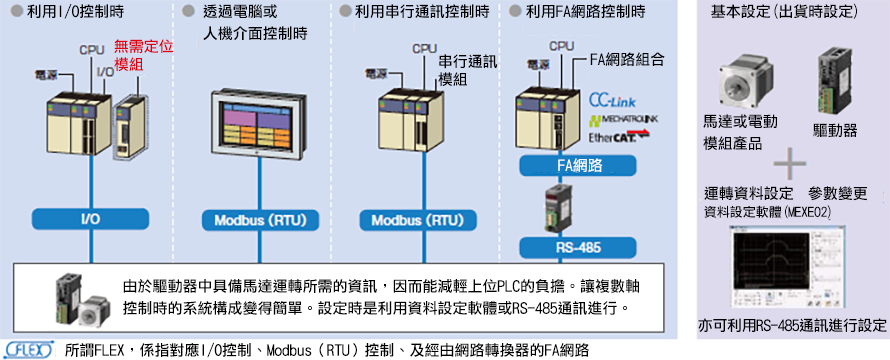
█ RS-485通訊脈波列輸入型
對驅動器輸入脈波以執行運轉的機型。可搭配由客戶所準備的定位模組(脈波產生器),進行馬達控制。使用RS-485通訊,即可監視馬達的狀態資訊(位置、速度、轉矩、Alarm、溫度等等)。
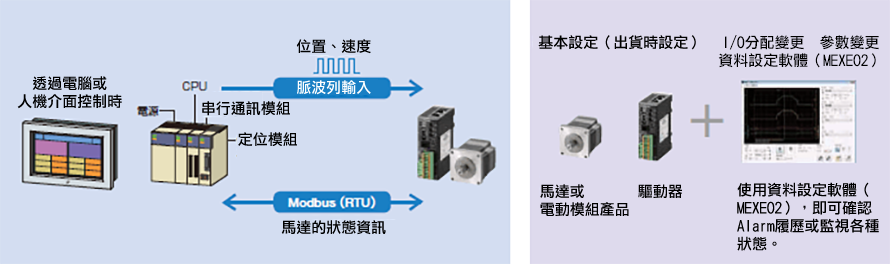
• 驅動器為DC電源輸入。
█ 脈波列輸入型
對驅動器輸入脈波以執行運轉的機型。可搭配由客戶所準備的定位模組(脈波產生器),進行馬達控制。使用資料設定軟體(MEXE02),即可確認Alarm履歷或監視各種狀態。

• 驅動器為DC電源輸入。
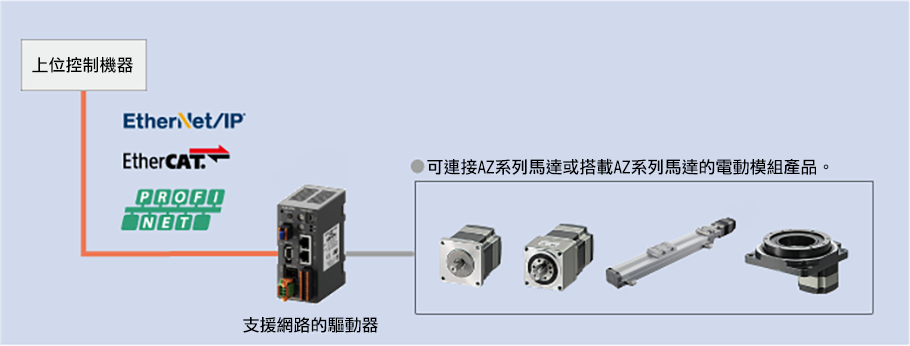
█ 支援網路的驅動器
可從網路直接控制。上位控制機器與驅動器間使用一條通訊電纜線連接,節省配線。
* EtherCAT®為Beckhoff Automation GmbH(德國)授權的註冊商標,為已取得專利的技術。
* EtherNet/IP™為ODVA的商標。
* PROFINET為PROFIBUS Nutzerorganisation e.V.(PNO)的商標或註冊商標。
* EtherNet/IP™為ODVA的商標。
* PROFINET為PROFIBUS Nutzerorganisation e.V.(PNO)的商標或註冊商標。
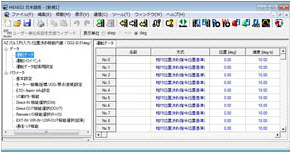
▎使用資料設定軟體 MEXE02從電腦簡單驅動
透過使用資料設定軟體 MEXE02,除了可設定或編輯運轉資料及各種參數,亦可示教、監視各種狀態。
█ 透過各種功能,從起動到維修全面支援
| 起動、評估 | ▶ | 調整 | ▶ | 診斷、維修 |
| 備有可助於配線檢查或測試運轉的功能。 | 備有設備設置後有助於調整馬達動作的功能。 | 備有開始運用後有助於在發生問題時進行診斷或維修的功能。 | ||
| ・運轉資料的設定及保存 ・I/O監視 ・示教遙控運轉 |
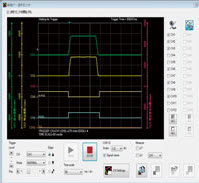
・波形監視 | ・Alarm監視 ・組合資訊監視 ・狀態監視 |
||
|
運轉資料/參數設定畫面 |
波形監視 |
█ 移動量可以最小移動量進行設定
運轉時必要的最小移動量已在出貨時預先設定。請參閱下表。
運轉資料的移動量可以最小移動量為單位設定。
運轉資料的移動量可以最小移動量為單位設定。
| 範圍 | 系列 | 最小移動量(出貨時) |
| 電動滑台 | EAS系列、EZS系列、EZSH系列 | 0.01 [mm] |
| 電動缸 | EAC系列 | 0.01 [mm] |
| 小型電動缸 | DR系列、DRS2系列 | 0.001 [mm] |
| 齒條 · 齒輪系統 | L系列(高速) | 0.01 [mm] |
| L系列(高可搬重量) | 0.001 [mm] | |
| 電動夾爪 | EH系列(2爪) | 0.01 [mm] |
| 中空旋轉平台 | DGⅡ系列 | 0.01 [deg] |
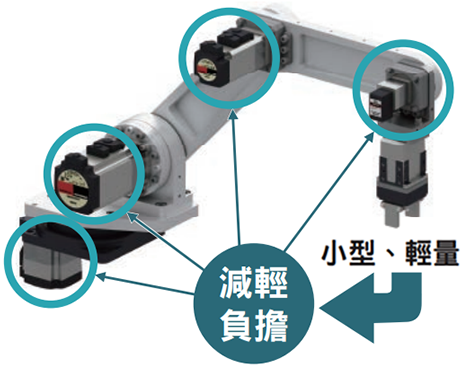
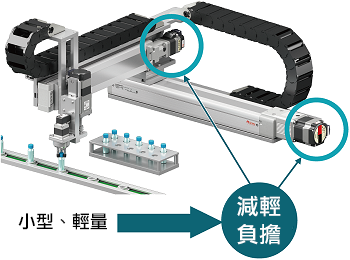
█ 減輕各關節的負擔,有助於機器人整體的小型化並降低成本
末端軸若變得小型、輕量,就可減輕各關節的負擔,有助於機器人整體的小型化並降低成本。
 |
| EH3-AZAKH | EH4-AZAKH | EH4T-AZAKH |
 |
 |
 |
| W42.5mm×D80.5mm ×H36mm |
W48.5mm×D91mm ×H46mm |
W48.5mm×D98mm ×H46mm |
| 重量:200g | 重量:380g | 重量:380g |
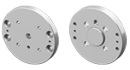
| 備有將EH系列安裝在市售工業機器人(協作機器人)時所需的凸緣。 包含末端軸側、機器人側的2片組。 機器人側的凸緣形狀符合ISO9409-1(JIS B 8436)。 |
 |
|
末端軸側 |
機器人側 |
 |
█ 無需安裝外蓋,有助於提高設計的自由度及輕量化
備有可安裝凸緣的產品種類,可彈性安裝於客戶設計的直交軸機器人前端等。
 |
|
延伸閱讀
➤ 實現細緻的「抓取」動作
➤ 步進馬達也可以進行閉回路控制嗎?
➤ 工業4.0改革 – 設備不停機的「預知保全」觀念
應用案例
█ 種類、規格
• 2爪型
| 最大夾持力 | 行程 (兩側) |
最小移動量 (兩側) |
尺寸 | 重量 | |
|
EH3-AZAKH
|
7N | 0 ~ 15mm | 0.02 mm | W42.5mm × D80.5mm × H36mm | 200g |
|
EH4-AZAKH
|
25N | 0 ~ 25mm | W48.5mm × D91mm × H46mm | 380g |
• 3爪型
| 最大夾持力 | 夾持徑 ∗1∗2 | 尺寸 | 重量 | |
|
EH4T-AZAKH NEW
|
27N | 夾持工作物的外徑 φ2~φ24mm 夾持工作物的內徑 φ14~φ36mm |
W48.5mm × D98mm × H46mm | 380g |
|
EH4T-AZAK NEW
|
W47mm × D90.5mm × H46mm | 280g |
∗1 針對夾持物的直徑(D)考量約0.5mm(最小值)的間隙後的值。
∗2 夾具直徑(d)為φ6mm時
如需產品圖檔,請洽廣億科技服務人員,謝謝!